|
亜婡懱柤
暍峛錰摿姠漟乛Plated Rootwalla乛僾儗僀僥僢僪丒儖乕僩儚儔 亜媟婡峔 媟偺婡峔丗 僗儔僀僟乕儕儞僋婡峔 摦椡丗 儅僽僠惢RS-380PH亊俀 摦嶌揹埑丗 俈丏俀V 尭懍斾丗 俉俇丗侾 媟偺悢丗 俀僙僢僩 傾儞僾丗 憃梩 MC俁俁侽CR亊俀 亜傾乕儉婡峔 傾乕儉偺婡峔丗 戝宆夞揮傾乕儉 摦椡丗 儌儞僗僞乕俆俆侽亊俀 摦嶌揹埑丗 俈丏俀V 尭懍斾丗 侾侽俋丗侾乮偔傜偄乯 傾儞僾丗 嫗彜 80921 僷乕僼僃僢僋僗KA-6傾儞僾 亊侾 |
|
| 仭婎杮僗儁僢僋 | ||||||||
|
亜婡懱柤
暍峛錰摿姠漟乛Plated Rootwalla乛僾儗僀僥僢僪丒儖乕僩儚儔 亜媟婡峔 媟偺婡峔丗 僗儔僀僟乕儕儞僋婡峔 摦椡丗 儅僽僠惢RS-380PH亊俀 摦嶌揹埑丗 俈丏俀V 尭懍斾丗 俉俇丗侾 媟偺悢丗 俀僙僢僩 傾儞僾丗 憃梩 MC俁俁侽CR亊俀 亜傾乕儉婡峔 傾乕儉偺婡峔丗 戝宆夞揮傾乕儉 摦椡丗 儌儞僗僞乕俆俆侽亊俀 摦嶌揹埑丗 俈丏俀V 尭懍斾丗 侾侽俋丗侾乮偔傜偄乯 傾儞僾丗 嫗彜 80921 僷乕僼僃僢僋僗KA-6傾儞僾 亊侾 |
|
| 媟偲偐 | ||||||||
|
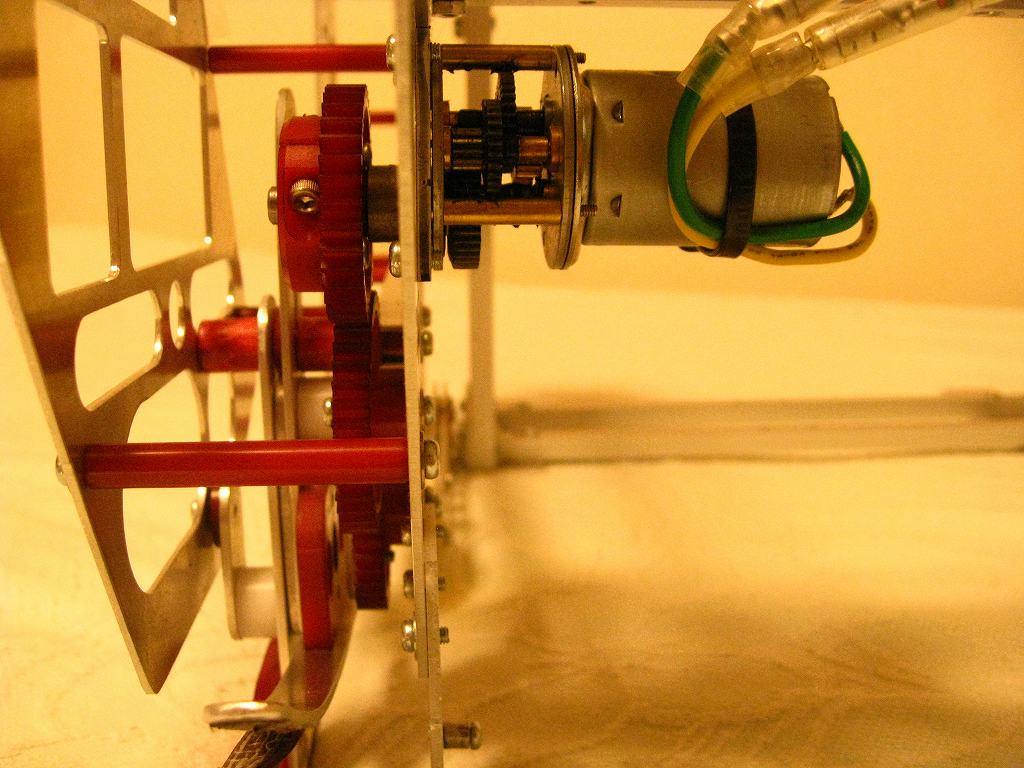
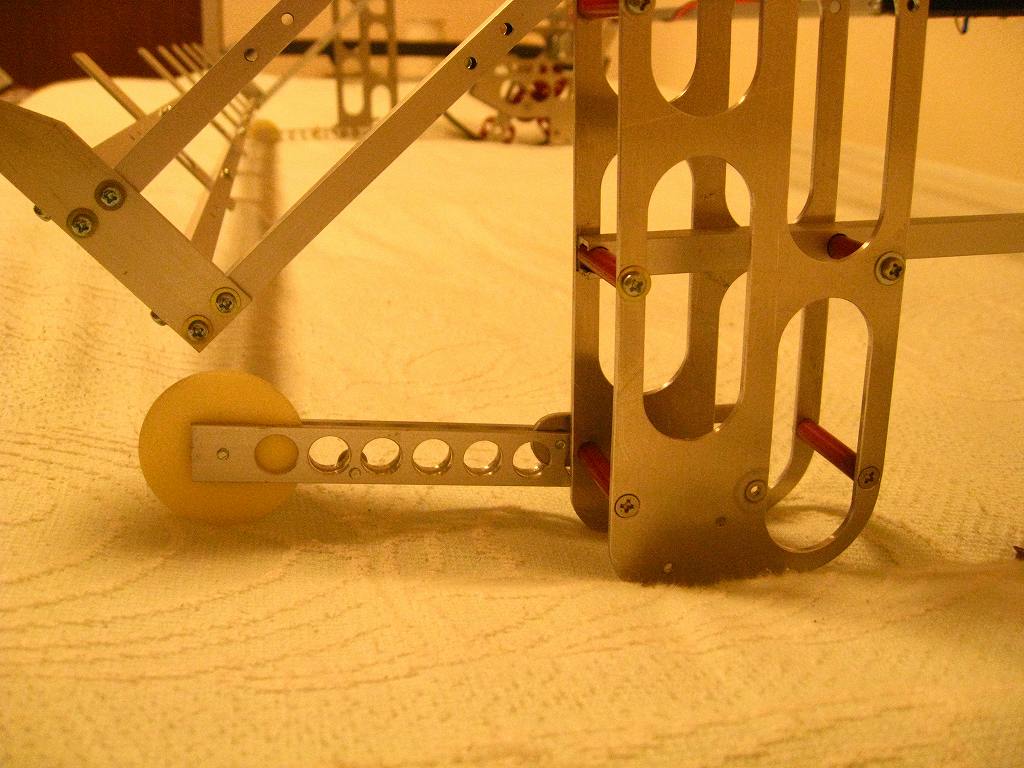
亜媟偺峔惉
僞儈儎惢僊傾僪儌乕僞乕俈俆:1偵KHK惢DS1-35傪庢傝晅偗DS1-40偵揱払偟偰尭懍偟偰偄傞丅 DS1-36偺庢傝晅偗偵偼POM惢偺僙僢僩僇儔乕傪巊梡偟僩儖僋儕儈僢僞乕偺栶妱傪帩偨偣偰偄傞丅 嵟廔揑側僊傾斾偼俉俇丗侾丅 亜抏椡偺偁傞戝嶨攃側媟 戝宆偺侾俉侽亱埵憡偺僗儔僀僟乕儕儞僋婡峔傪嵦梡丅 戝宆偺媟傪備偭偔傝偲摦偐偡偺偱偦傟側傝偺懍搙偱堏摦偱偒傞丅 |
|
| 傾乕儉偲偐 | ||||||
|
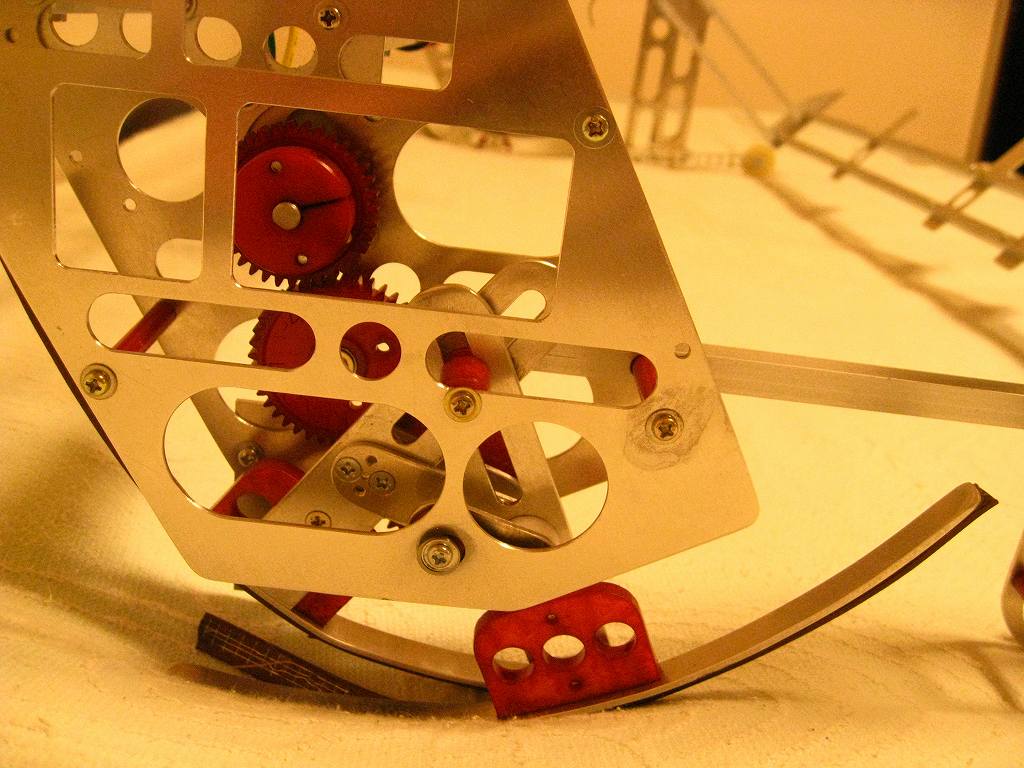
亜傾乕儉偺峔惉
嫗彜 儌儞僗僞乕俆俆侽俀僐暲傋偵23T偺僺僯僆儞傪庢傝晅偗KHK惢LS0.5-70偵偰尭懍偟偨屻僪儕儖僿僢僪偵擖椡丅 嵟廔揑側僊傾斾偼侾侽俋丗侾乮偔傜偄乯偵側偭偰偄傞 夞揮傾乕儉偵偟偰偼抶偄偺偩偑傾乕儉偵儘儃僢僩傪堷偭偐偗偨傑傑帺桼偵夞揮偡傞偙偲偺偱偒傞傎偳偺僩儖僋傪敪婗偡傞丅 亜摦椡偺揱払 夞揮傾乕儉偺弌椡偼嫤堢帟幵惢僗僾儘働僢僩偲僾儖僩儞僠僄儞惢25R偺僠僃乕儞傪巊梡丅 崱偺偲偙傠偪偓傟偰偄側偄丅 亜嶁杮僕儏儕僄僢僞僔僗僥儉偵偮偄偰 偄傑庡棳偺崅懍夞揮偱懳徾傪偼偠偒旘偽偡偺偱偼側偔傾乕儉偺愭抂偵憰旛偟偨孡偵揋傪堷偭偐偗帩偪忋偘傞傛偆側塣梡傪偡傞丅 儘僢僪傾乕儉偵嬤偄巊偄曽偑峫偊傜傟傞丅 慡挿偼400mm埲忋偵払偡傞 椡傪捛媮偟偨夞揮傾乕儉偺寢壥偱偁傞丅 |
|
| 塣斃僗僞僀儖偲偐 | ||||||
|
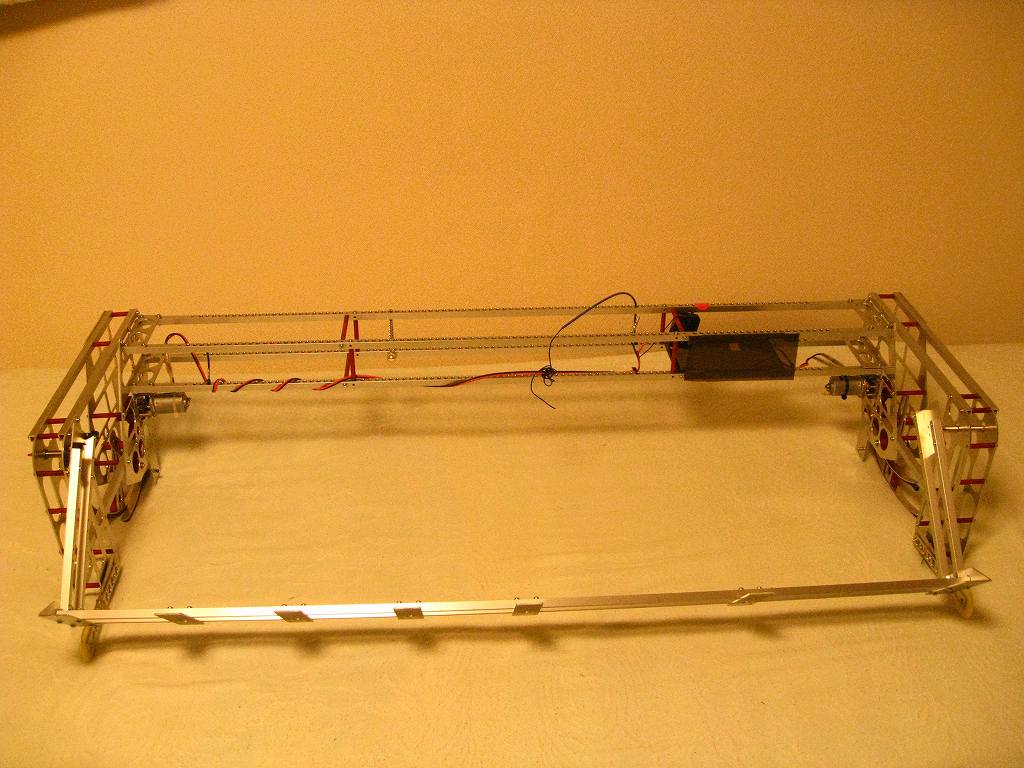
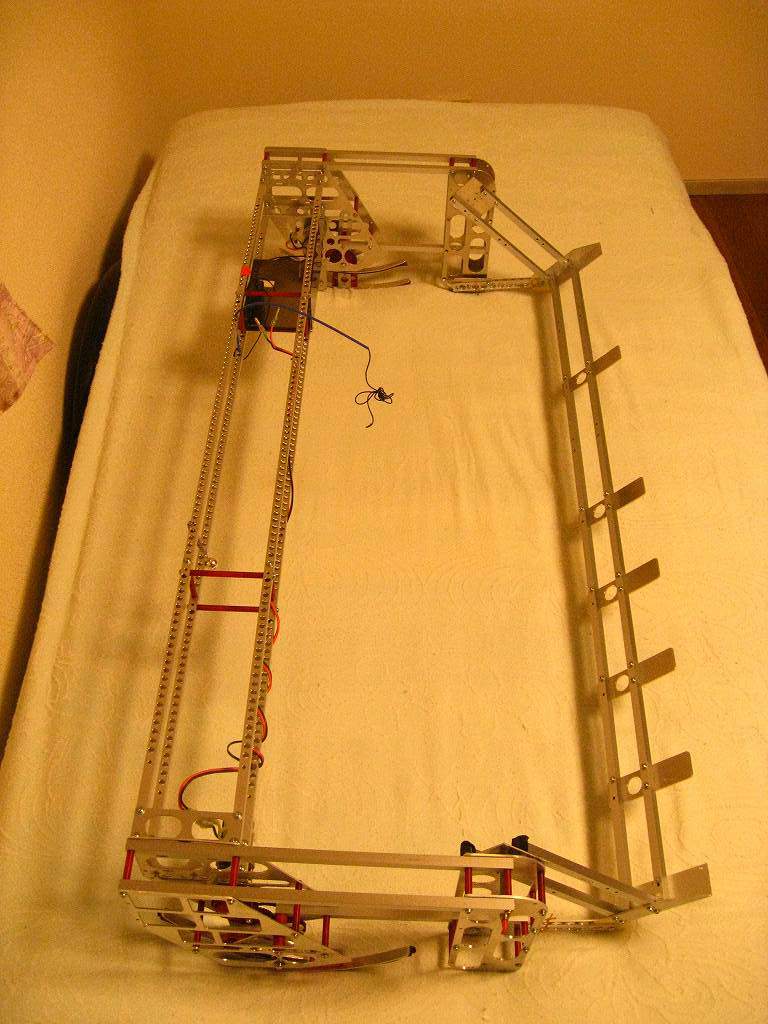
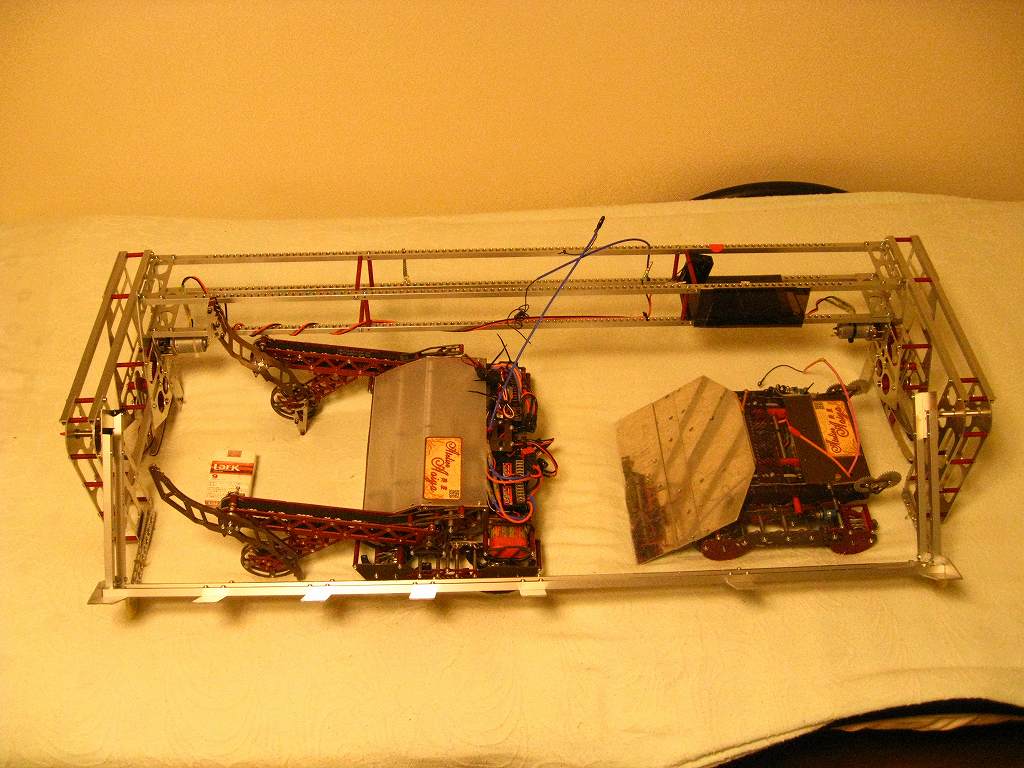
亜懠偺婡懱偲偺懳斾
婡懱偺僒僀僘偼揥奐屻偱 偨偰丗526mm 傛偙丗1213mm 崅偝丗240mm 偲側傞偨傔懠偺婡懱偵斾傋偰僶僇偘偨僒僀僘偱傞丅 墶暆偼儂乕儉僙儞僞乕偵攧偭偰偄傞妏僷僀僾偑998mm偩偭偨偺偱偙偺僒僀僘偵側偭偨丅 幨恀偼婡懱撪偵俀戜偺儘儃僢僩偲lark傪抲偄偨偲偙傠丅傑偩梋桾偑偁傞 偟偐偟枾搙偑掅偔僗僇僗僇側偺偱懪寕偑偁偨傞偲娙扨偵悂偭旘傇丅 偐傢偝偒儘儃僢僩嫞媄夛嵟戝偺墶暆傪婰榐偟偰偄傞傫偠傖側偄偐偲丅 亜塣斃曽朄 戝偒偡偓偰擖傟暔偑柍偐偭偨偺偱愱梡偺戃傪嶌偭偨丅 塣斃偼曗彆椫側偳傪偨偨傫偩忬懺偱偙偺戃偵擖傟偰帩偪塣傇丅 揹幵偱偺堏摦側偳寢峔抪偢偐偟偄丅 |
|