|
亜婡懱柤
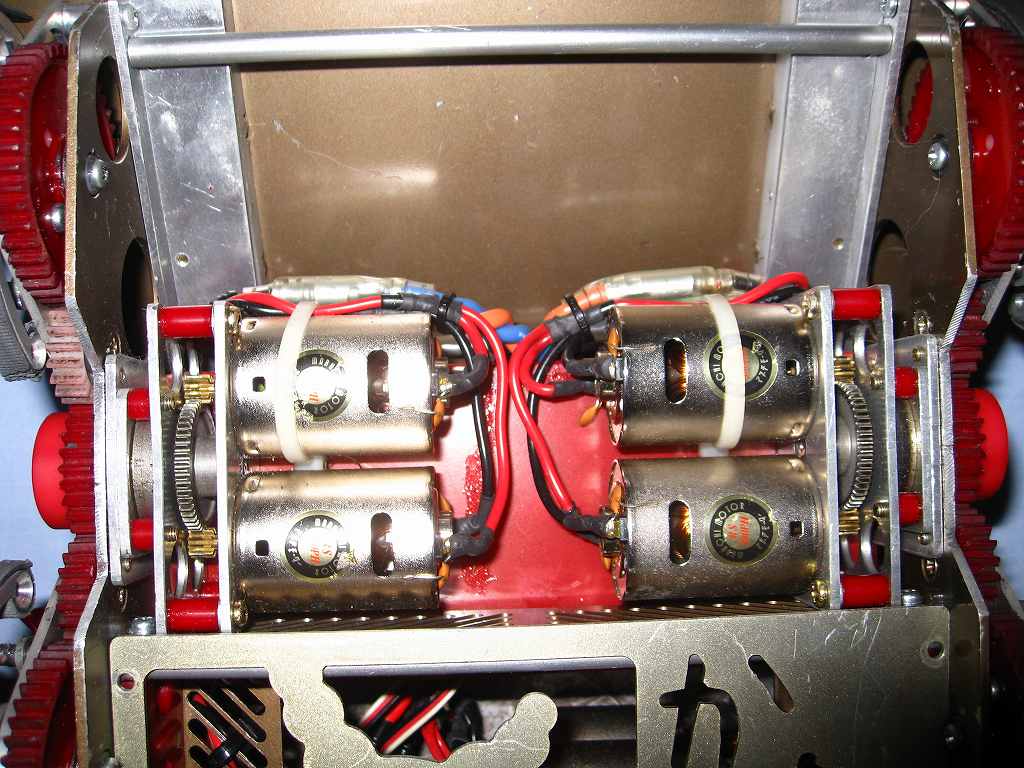
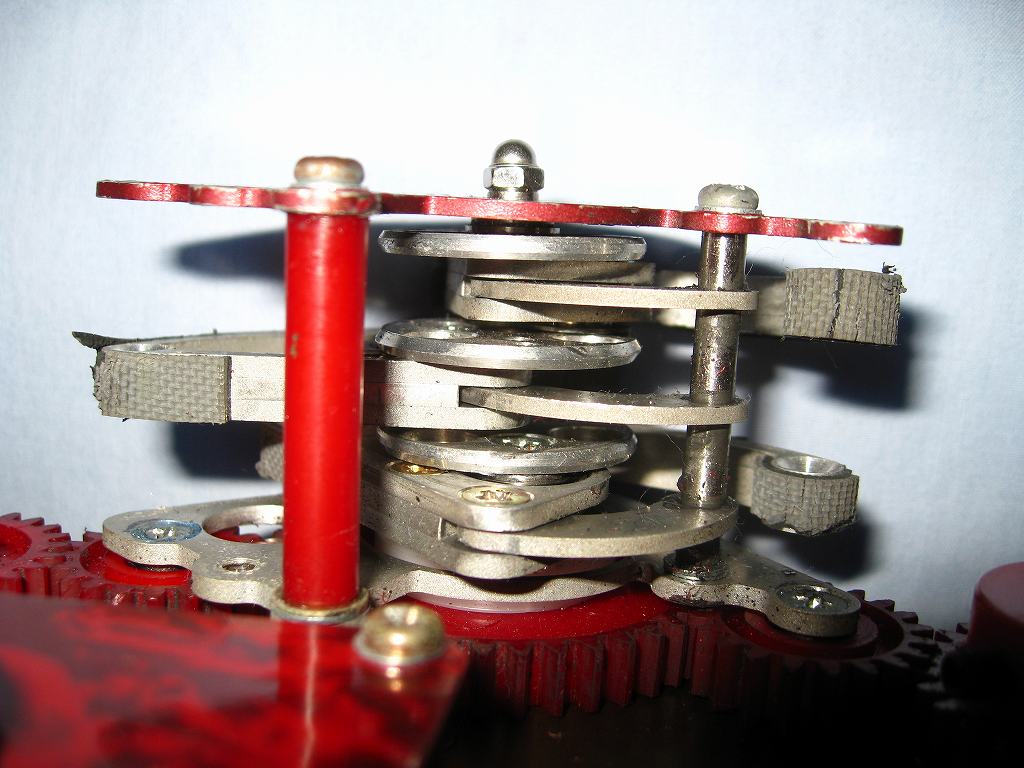
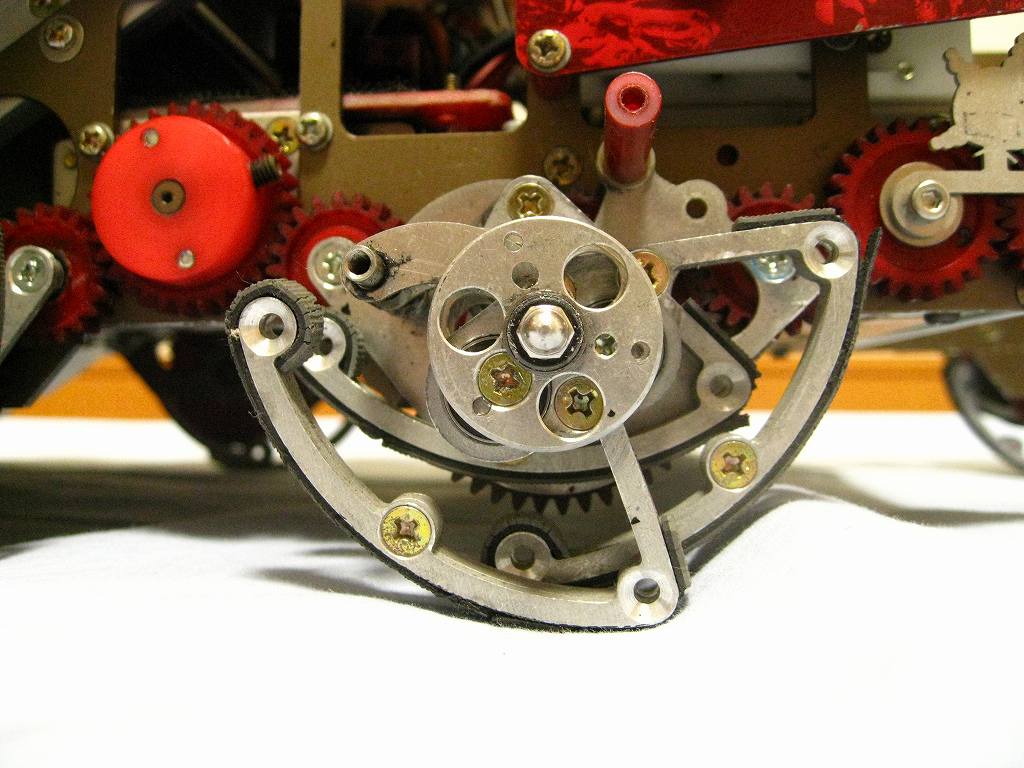
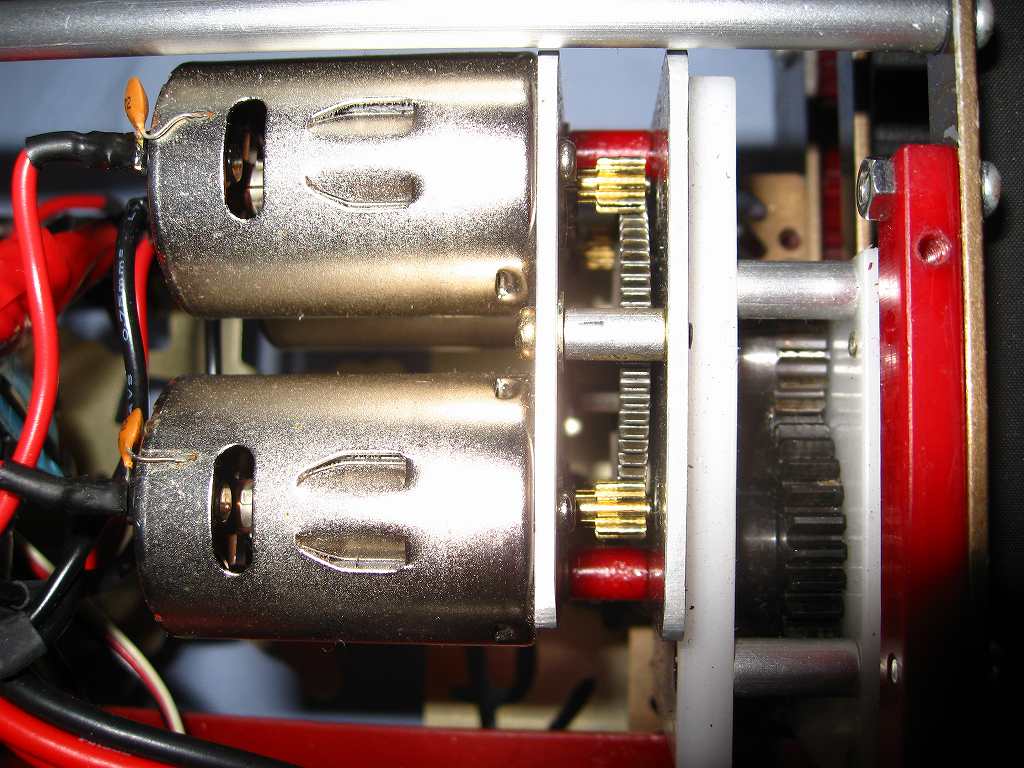
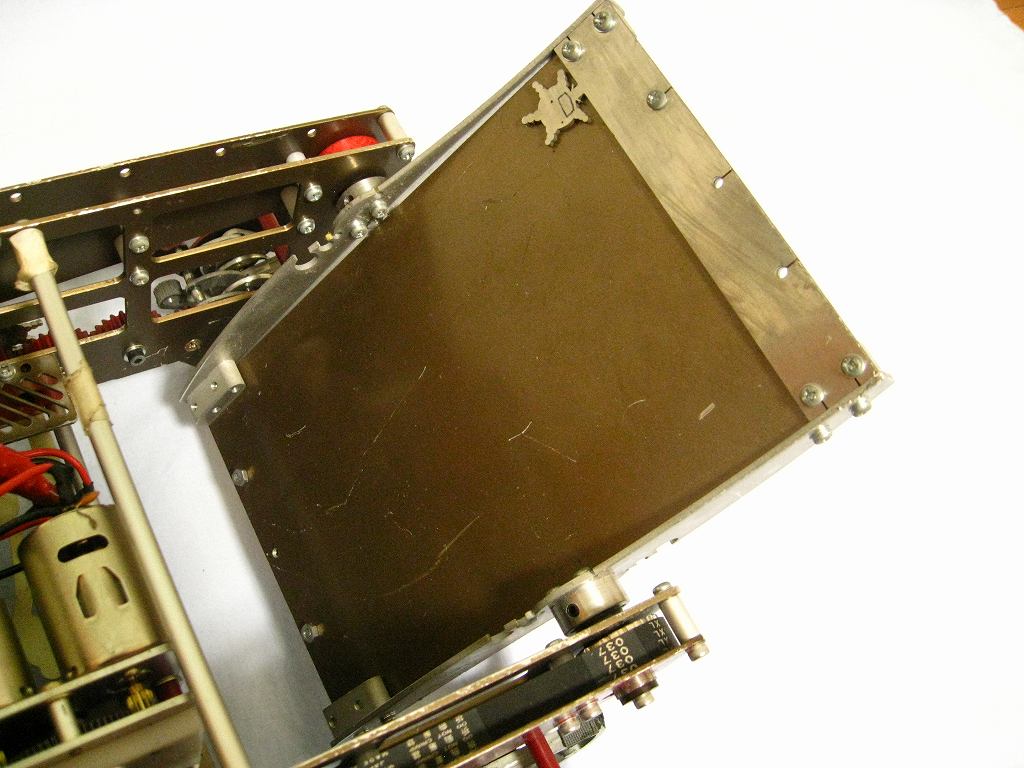
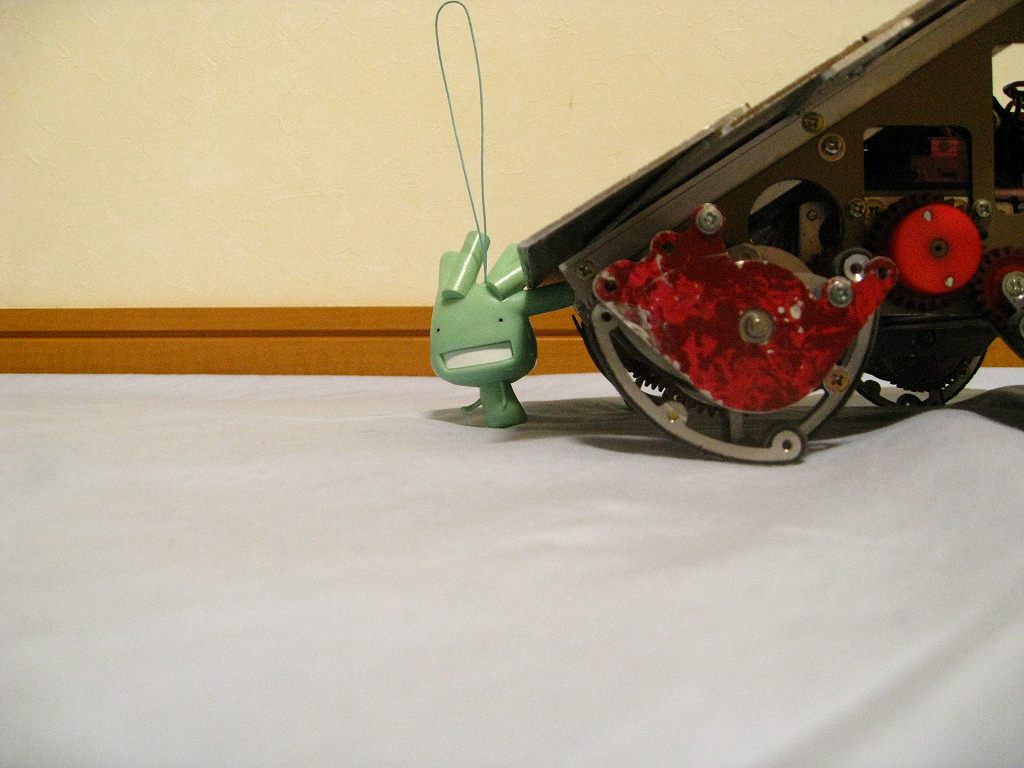
煍擔錰摿姠漟乛Basking Rootwalla乛僶僗僉儞僌丒儖乕僩儚儔 亜媟婡峔 媟偺婡峔丗 TADANO僿僢働儞儕儞僋婡峔 摦椡丗 儅僽僠惢RS-380PH亊係 摦嶌揹埑丗 俈丏俀乣侾係丏係V 尭懍斾丗 俁俁丏俈俆丗侾 媟偺悢丗 係僙僢僩 傾儞僾丗 憃梩 MC俁俁侽CR亊俀 亜傾乕儉婡峔 傾乕儉偺婡峔丗 僔乕儖僪夞揮傾乕儉 摦椡丗 儅僽僠惢RS-380PH亊係 摦嶌揹埑丗 俈丏俀乣侾係丏係V 尭懍斾丗 俀係丗侾乮偔傜偄乯 傾儞僾丗 嫗彜 80921 僷乕僼僃僢僋僗KA-6傾儞僾 亊侾 揱払曽朄丗 僷儚乕僌儕僢僾僞僀儈儞僌儀儖僩220XL037偵傛傞儀儖僩揱払 |
|