|
>脚機構
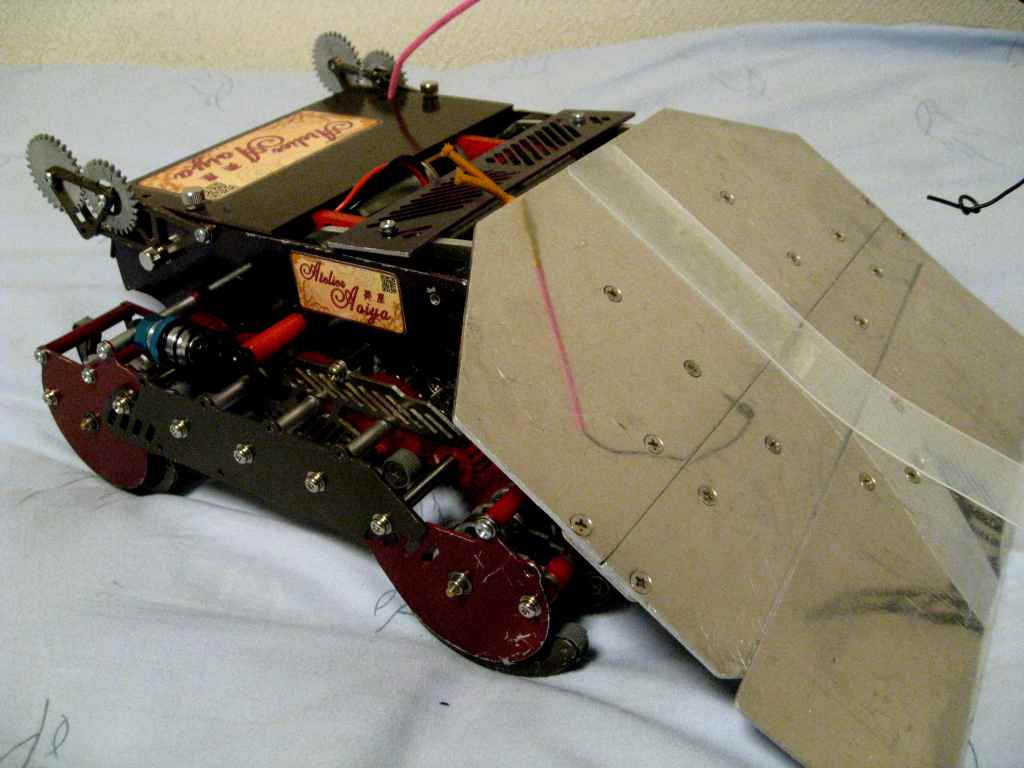
脚の機構: TADANOヘッケンリンク機構 動力: マブチ製RS-380PH×4 動作電圧: 7.2~14.4V 減速比: 18:1 脚の数: 3本1セット×4 アンプ: 双葉 MC401CR×2 >アーム機構 アームの機構: シールド跳ね上げタイプ 動力: タミヤ製ギアヘッド300:1×2 動作電圧: 7.2~14.4V 減速比: 600:1 アンプ: 双葉 MC401CR×1 |
|
| ■基本スペック | ||||||||||
|
>脚機構
脚の機構: TADANOヘッケンリンク機構 動力: マブチ製RS-380PH×4 動作電圧: 7.2~14.4V 減速比: 18:1 脚の数: 3本1セット×4 アンプ: 双葉 MC401CR×2 >アーム機構 アームの機構: シールド跳ね上げタイプ 動力: タミヤ製ギアヘッド300:1×2 動作電圧: 7.2~14.4V 減速比: 600:1 アンプ: 双葉 MC401CR×1 |
|
| 脚とか | ||||||||||
|
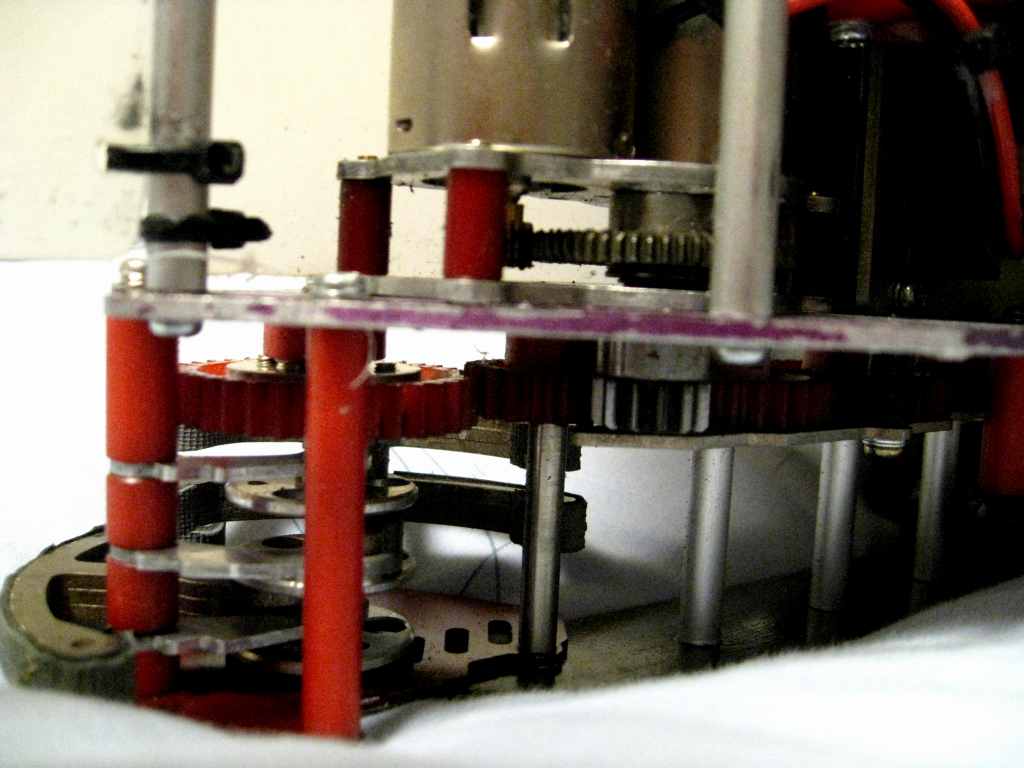
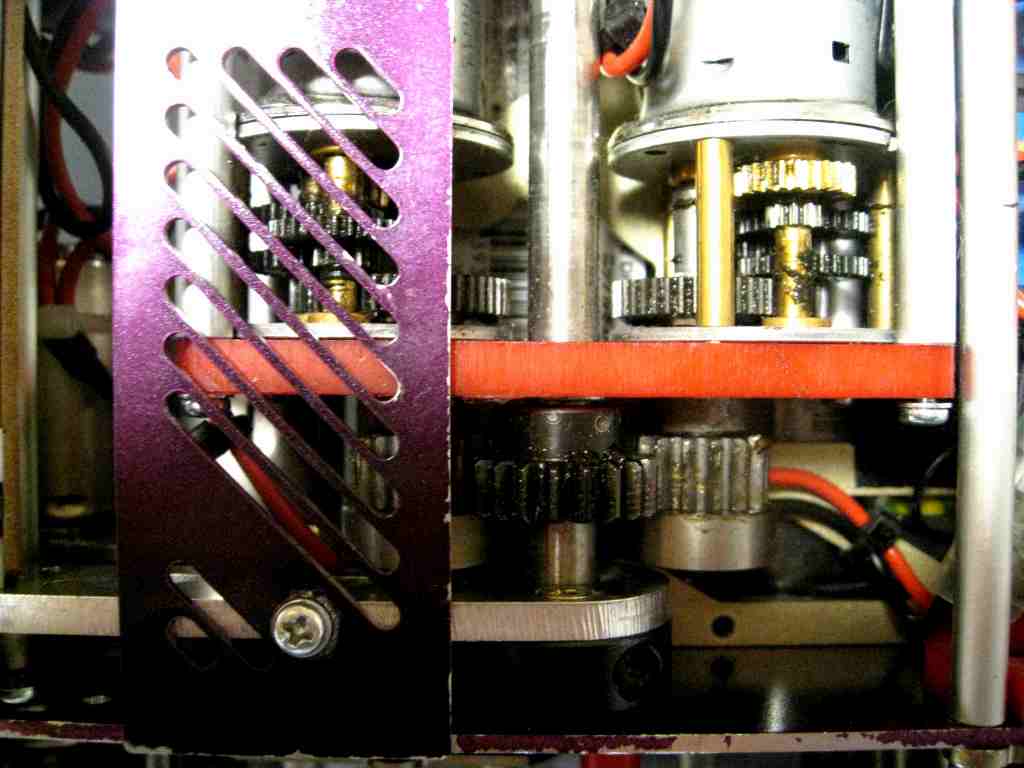
>脚の構成
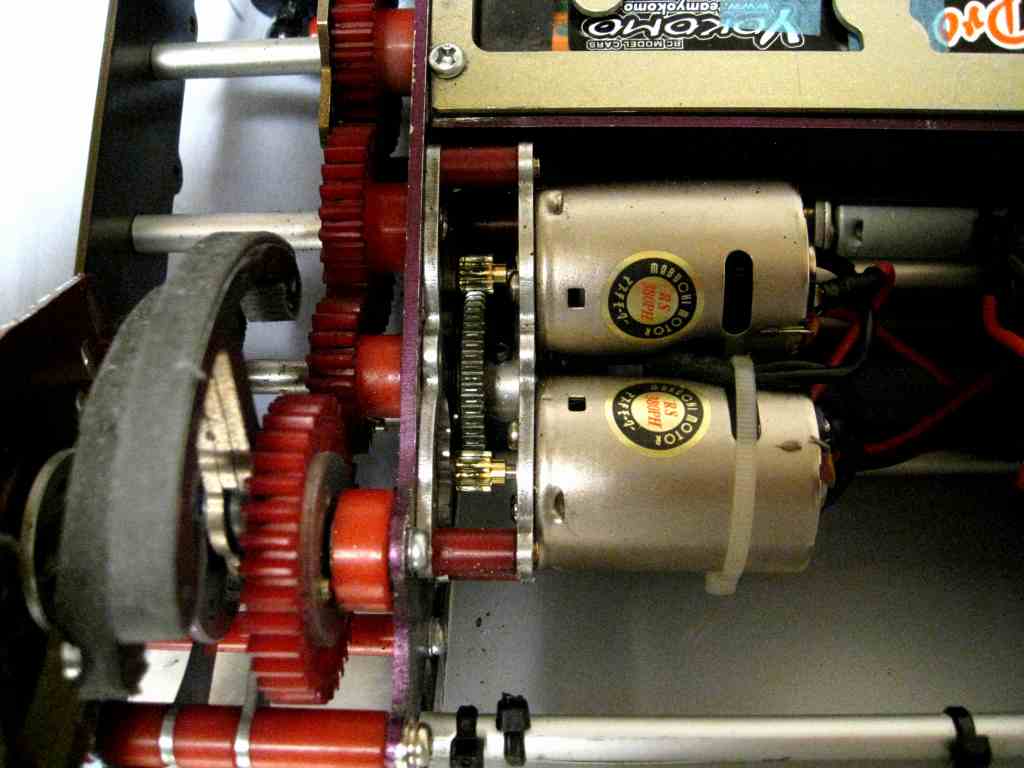
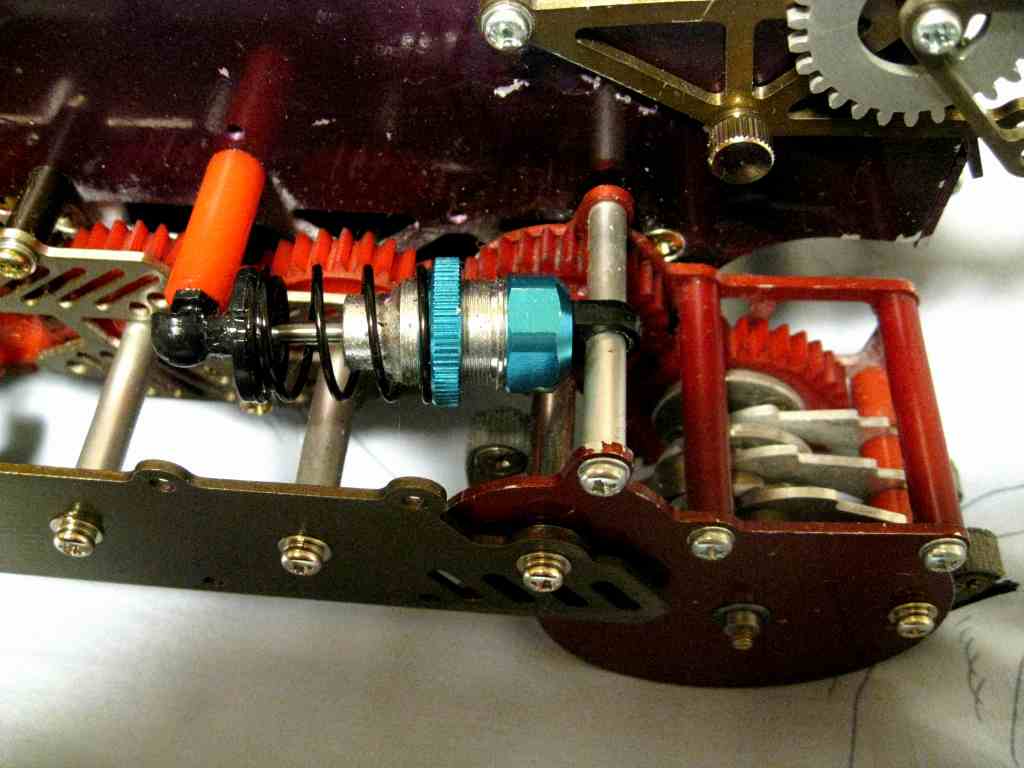
マブチ製RS-380PHにE-Skyラジコンヘリ用ピニオンギア10T(EK1-0352)を圧入し、 KHK製焼結ギアLS0.5-60で減速。 出力軸にKHK製SSY1-12をイモネジで固定し、最終的にKHK製DS1-36で減速している。 最終的なギア比は18:1だがツインモーターなので十分なトルクを発揮する。 >サスペンションによるスムーズな動作 後ろ脚のみサスペンション機構を搭載。(3Racing M03M-13/LB アルミダンパーセット (M03M-13/LB)) これにより小型機の割に優れた走破性を発揮する。 どれかの脚が丘陵に乗り上げてもサスペンションが沈み込み全体のバランスをとるので脚がリングに接地しやすい。 また脚が稼動することで丘陵の側面に平行になろうとするので登坂性能に優れる。(後退限定) 副産物として前進時に車高が上がり、後退時に後ろ半身が沈み込むためシールドの角度が険しくなる。 >ヘッケンリンクによるなめらかな動作 脚先の軌跡を十分にシミュレーションしたTADANOヘッケンリンクを採用。 脚の最大上下動は0.079mm(理論値)を実現。ほぼ無振動の120°ヘッケンになっている。 行く脚と戻る脚の上下差が大きいと脚の慣性で振動が発生するのでクランクの回転半径は6.5mmに設定(パラメータ参照) |
|
| アームとか | ||||||||
|
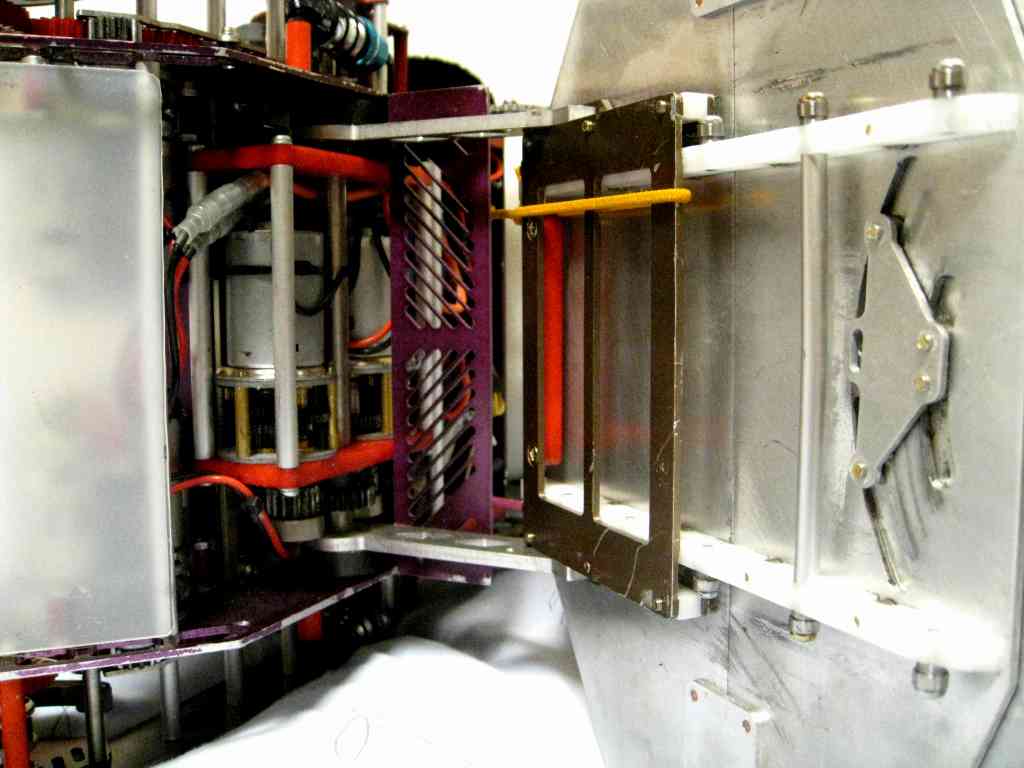
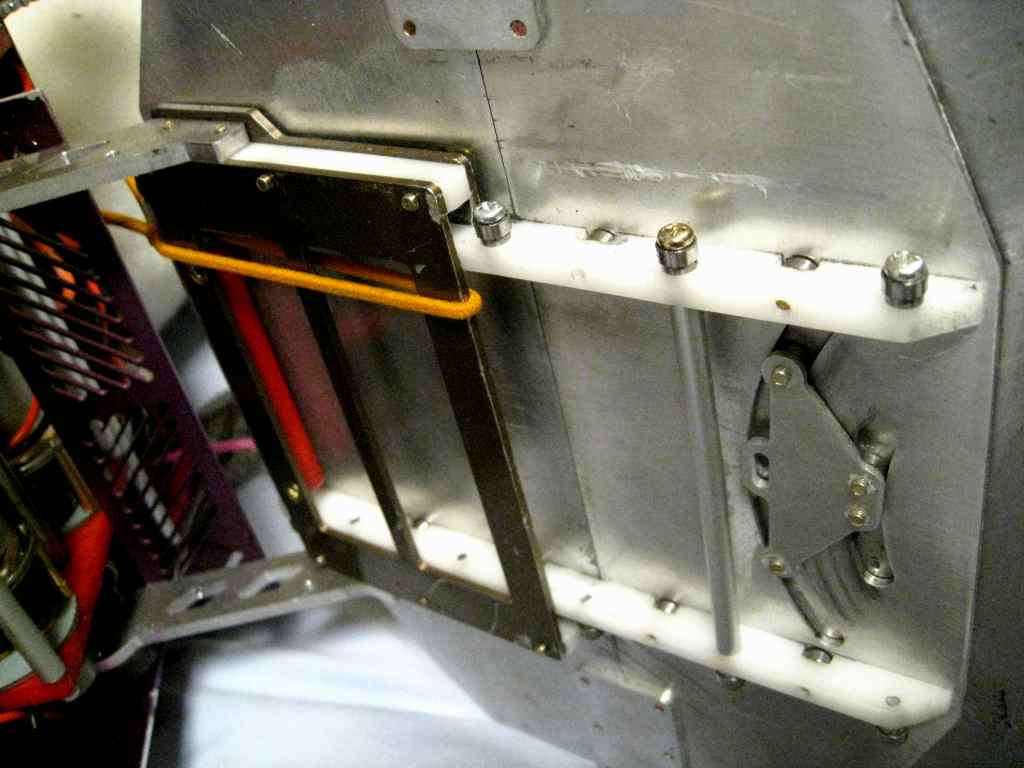
>アームの構成
タミヤ製ギアドモーター300:1を2コ並べ協育歯車S1S 14B-0805をイモネジで固定。KHK製SSY1-28で減速。 最終的に600:1のギア比になっている。 ロングロッドでもないのでギアヘッドは1つでもよかったかも知れない。 重量は余っているから気にしない。 >シールドアームの展開 普段機体前面をカバーしているシールドを跳ね上げることで敵の機体を持ち上げることが出来る。 最大までシールドを持ち上げた時シールドの先端は地上から250mm程度に達する。 >シールドのスライド機構 シールドはそれ自体が上後方にスライドすることで走行中に丘陵を自動で回避する。 >魔女の鼻 編集中 >先端の回転機構 編集中 |
|