|
>名称
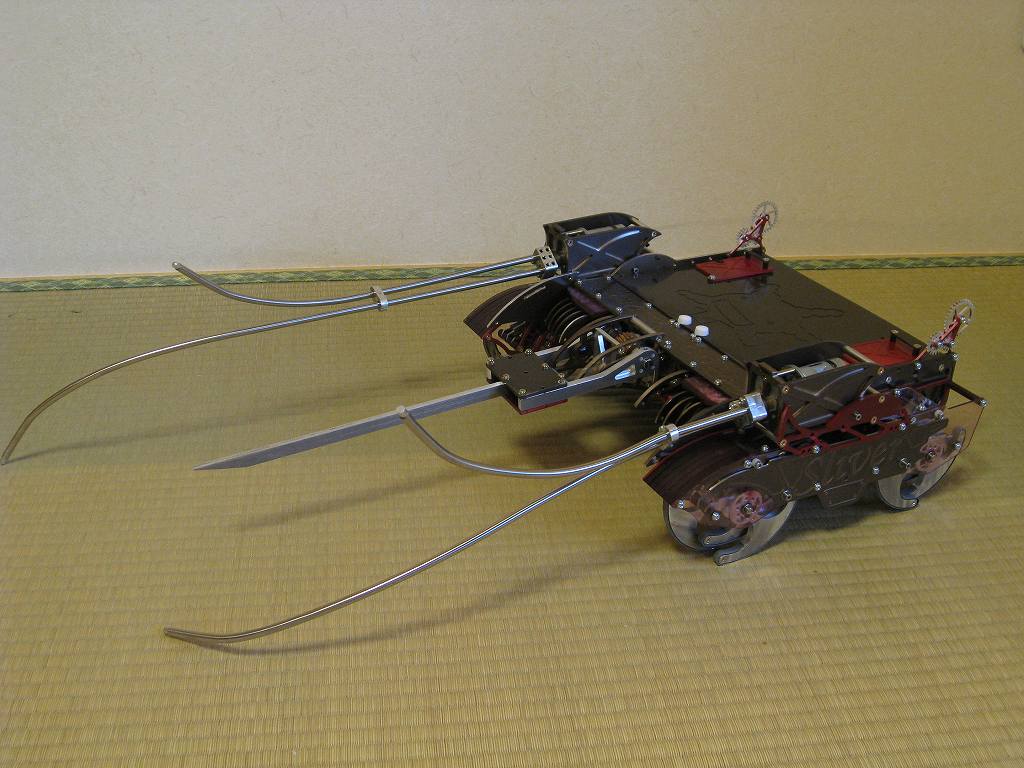
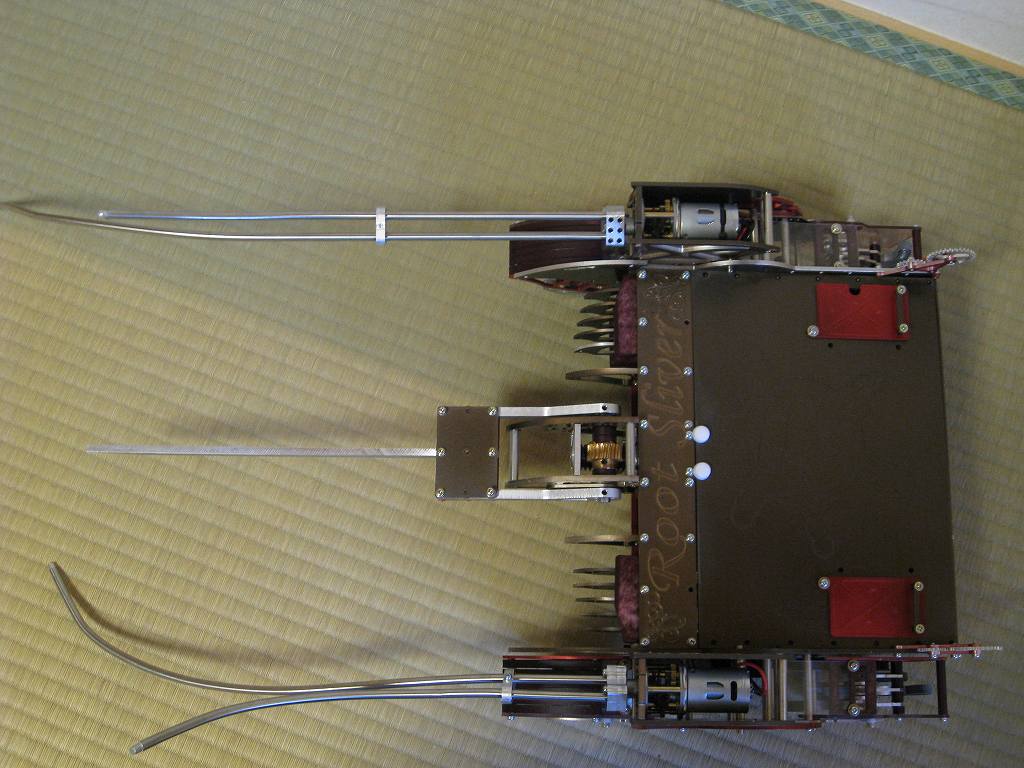
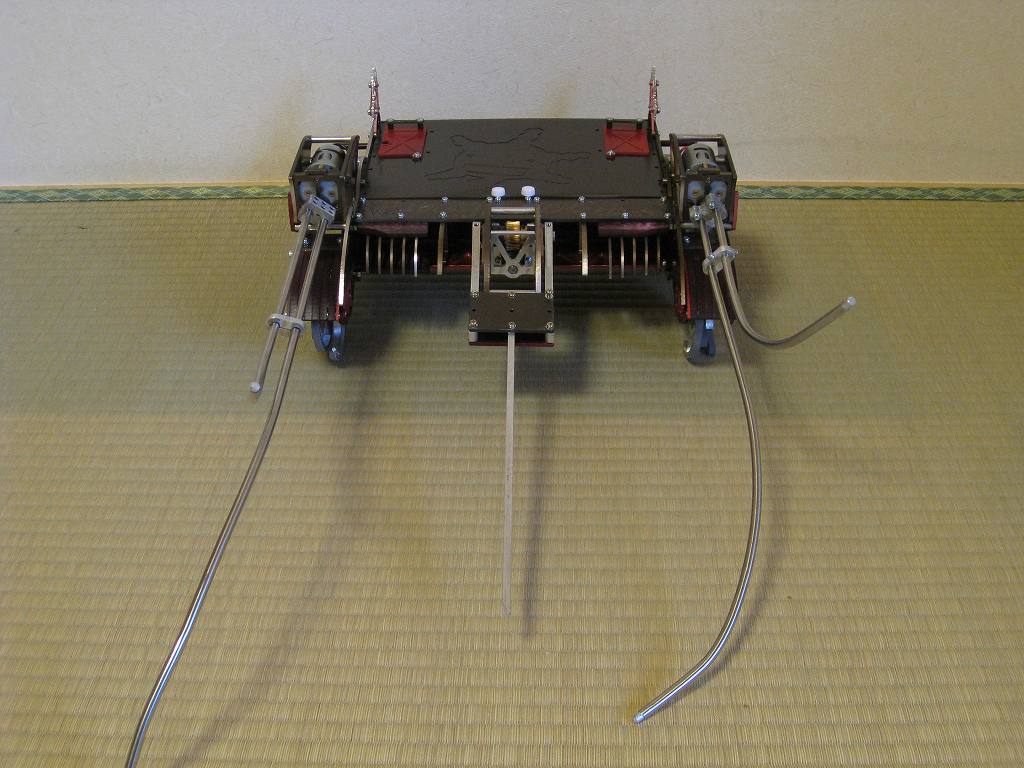
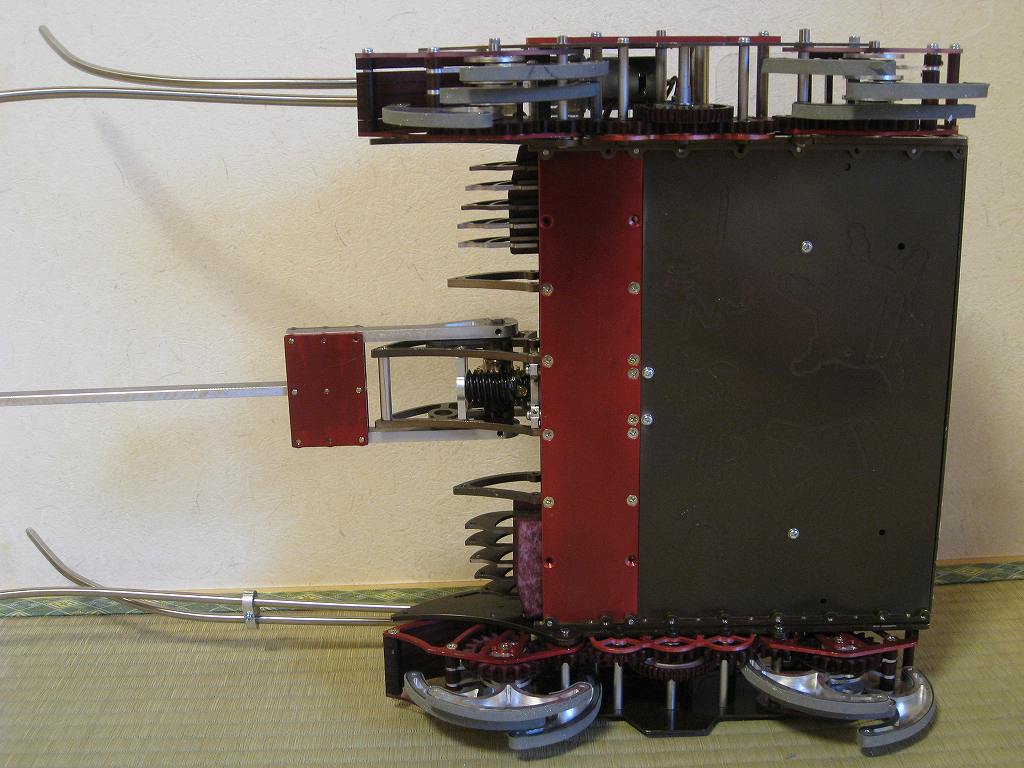
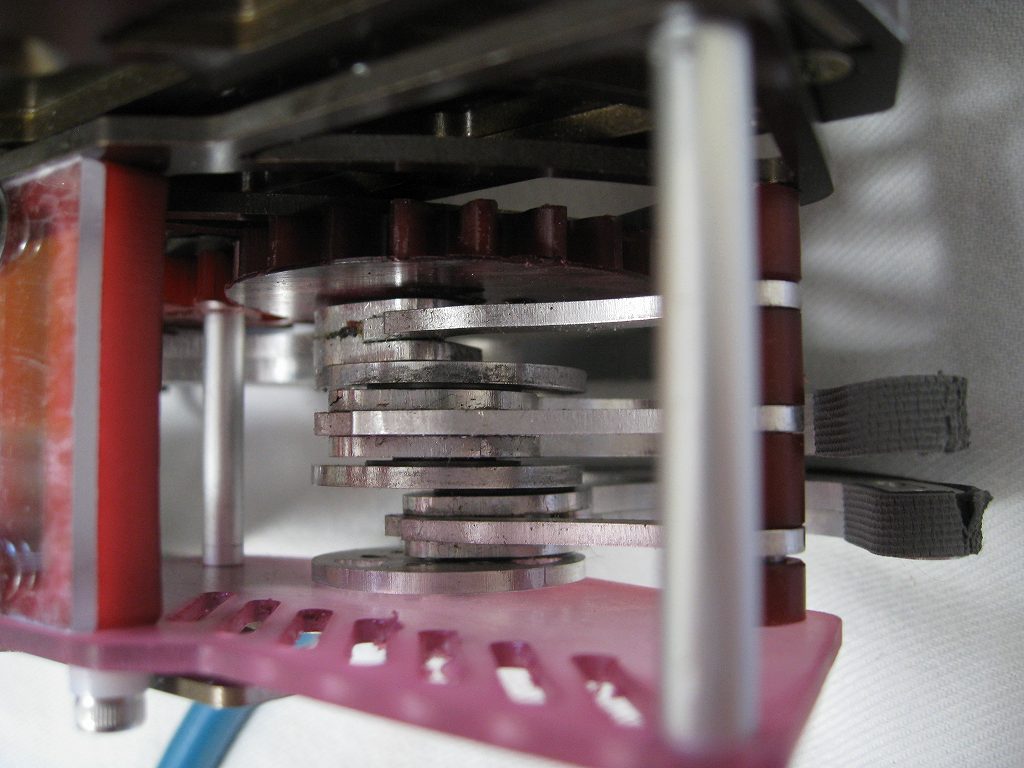
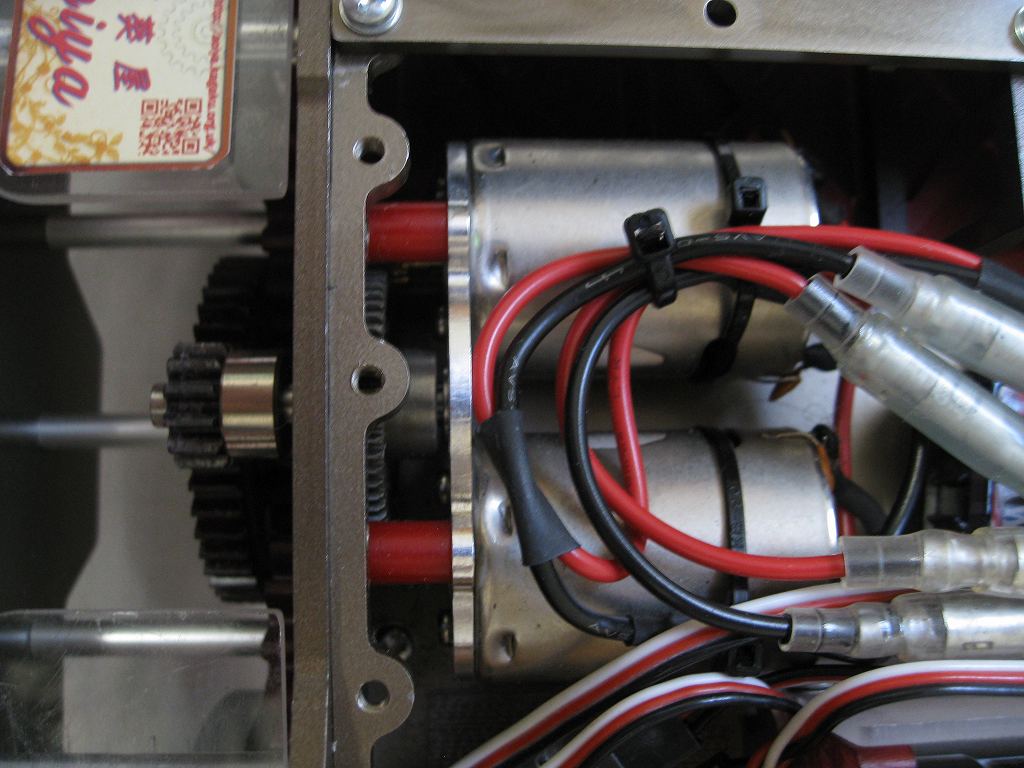
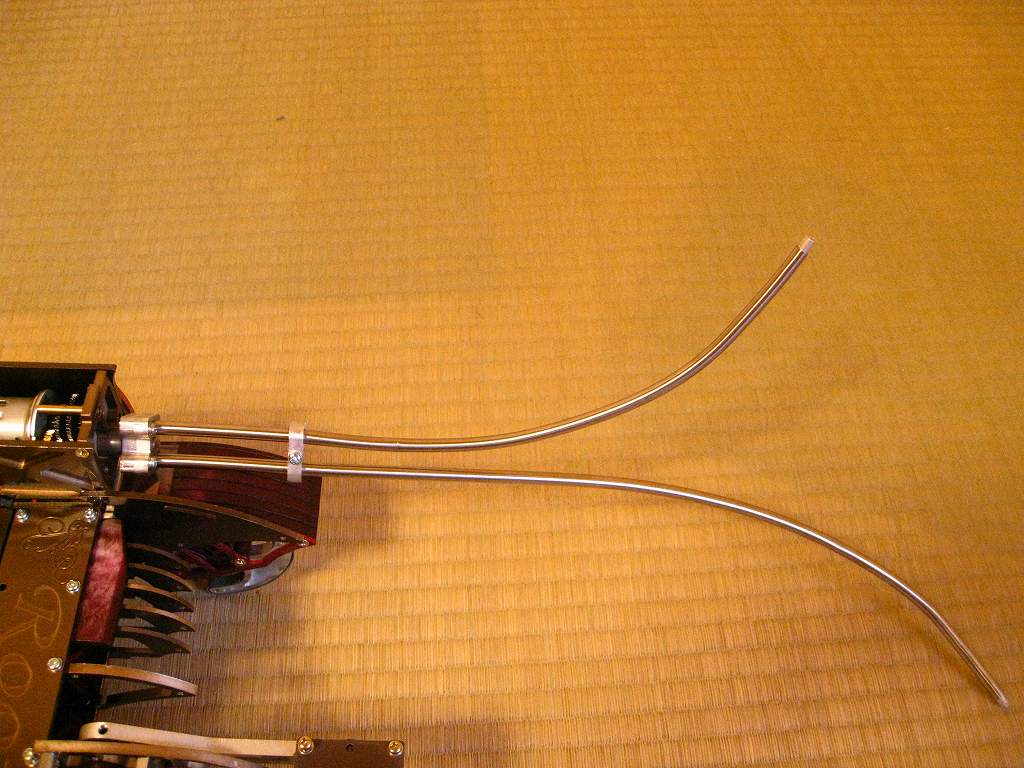
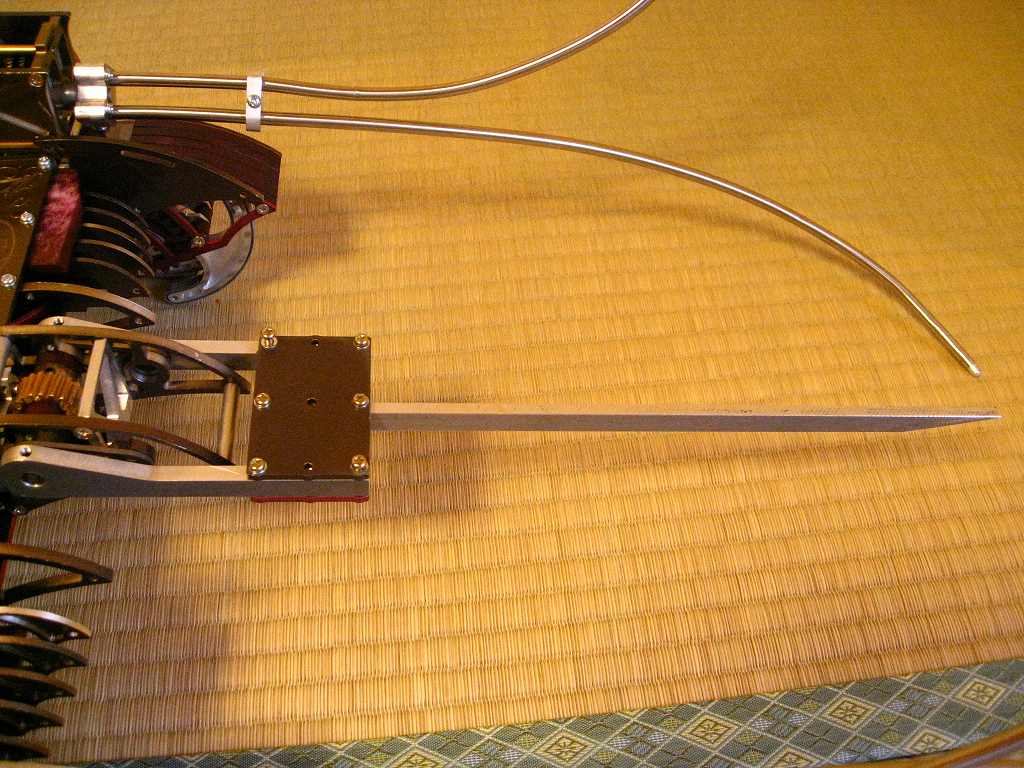
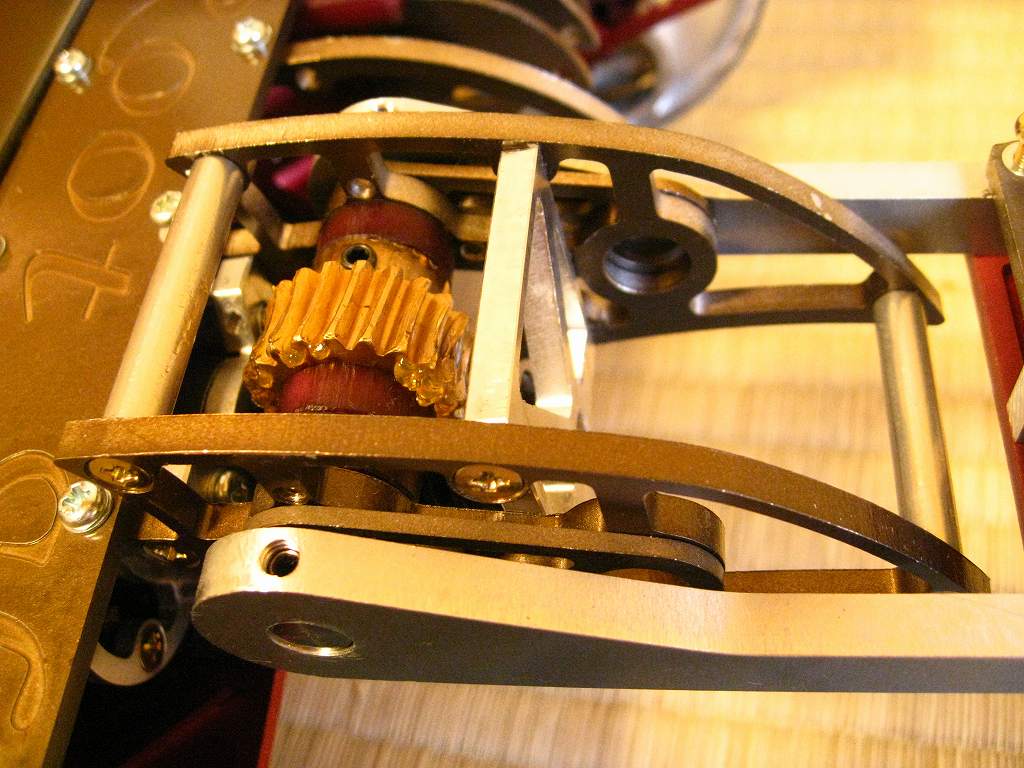
根生裂片妖/Root Sliver/ルート スリヴァー >脚機構 脚の機構: TADANOヘッケンリンク機構 動力: マブチ製RS-380PH×1×2 動作電圧: 7.2~14.4V 減速比: 41.6:1 脚の数: 3本1セット×4 アンプ: 双葉 MC330CR ロボコン仕様 (ブレーキキャンセル)×2 >アーム機構1 アームの機構: うねうね横回転アーム(rootアーム) 動力: マブチ製RS-380PH左右各1個 動作電圧: 7.2~14.4V 減速比: 300:1 アンプ: OPTION No.1クローラー専用ESC 主に敵に絡みつくために使用する 敵を横回転させるだけのトルクは発生できない。 消耗品です。おれたら交換が必要です。 >アーム機構2 アームの機構: ショートレンジロッドアーム 動力: マブチ製RS-380PH×2 動作電圧: 7.2~14.4V 減速比: 1114:1 アンプ: OPTION No.1クローラー専用ESC rootアームが絡みついてから敵を持ち上げるのに使用する。 |
|