|
亜柤徧
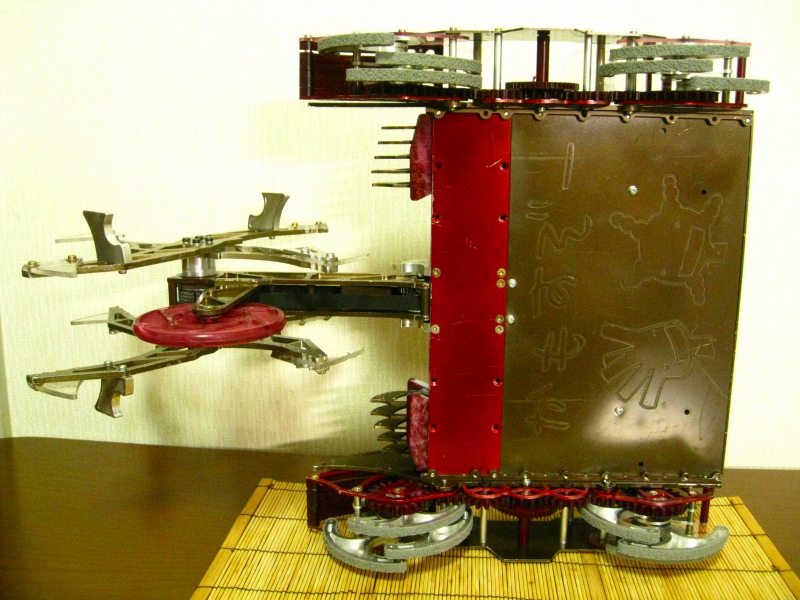
崻惗楐曅梔 墔崷/Root Sliver Rancor/僣乕僩 僗儕償傽乕 儔儞僇乕 3D夋憸 崻惗楐曅梔傪儅僀僫乕僠僃儞僕偟偨婡懱丅 墶夞揮偑廲夞揮僽儗乕僪偵側偭偨掱搙偺曄峏丅 懠偼摿偵曄峏偟偨晹暘偼側偄丅 |
|
| 仭婎杮僗儁僢僋 | ||||||||
|
亜柤徧
崻惗楐曅梔 墔崷/Root Sliver Rancor/僣乕僩 僗儕償傽乕 儔儞僇乕 3D夋憸 崻惗楐曅梔傪儅僀僫乕僠僃儞僕偟偨婡懱丅 墶夞揮偑廲夞揮僽儗乕僪偵側偭偨掱搙偺曄峏丅 懠偼摿偵曄峏偟偨晹暘偼側偄丅 |
|
|
亜媟婡峔
媟偺婡峔丗 TADANO僿僢働儞儕儞僋婡峔 摦椡丗 儅僽僠惢RS-380PH亊俀 摦嶌揹埑丗 侾係丏係V 尭懍斾丗 俆侽丗侾 媟偺悢丗 俁杮侾僙僢僩亊係 傾儞僾丗 憃梩 MC401CR亊俀 |
|
|
亜傾乕儉婡峔
傾乕儉偺婡峔丗 夞揮僽儗乕僪僞僀僾 摦椡丗 儅僽僠惢RS-380PH亊係 摦嶌揹埑丗 侾係丏係V 尭懍斾丗 俀俆丗侾 傾儞僾丗 OPTION No.1僋儘乕儔乕愱梡ESC亊侾 |
|
| 仭媟偲偐 | ||||
|
亜媟偺峔惉
儅僽僠惢RS-380PH偵E-Sky儔僕僐儞僿儕梡僺僯僆儞僊傾9T乮EK1-0352乯傪埑擖偟丄 KHK惢從寢僊傾LS0.5-60偱尭懍丅 弌椡幉偵KHK惢SSY1-12傪僀儌僱僕偱屌掕偟丄僕儏儔僐儞惢帺嶌僊傾偱尭懍偟偰偄傞丅 嵟廔揑側僊傾斾偼俆侽丗侾丅僔儞僌儖儌乕僞乕偩偑廫暘側僩儖僋傪敪婗偡傞丅 |
|
|
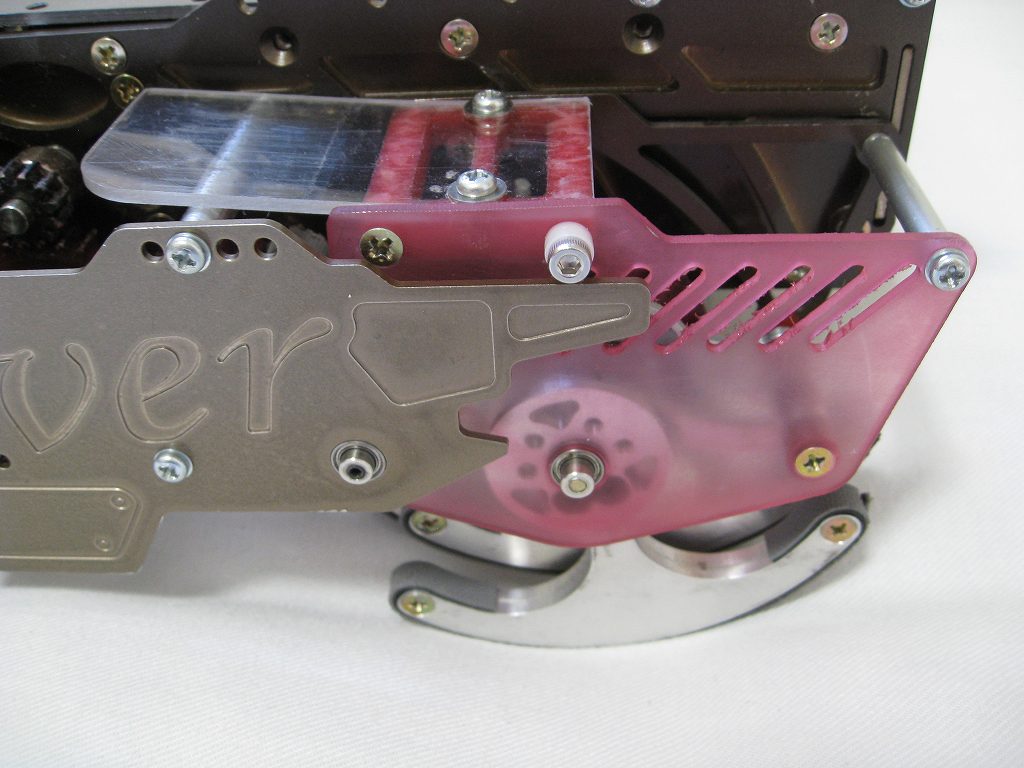
亜僒僗儁儞僔儑儞
偐傢儘儃偼晄惍抧傪憱峴偡傞偺偱僒僗儁儞僔儑儞婡峔偑桳岠偵側傞丅 忢偵慡偰偺媟偑儕儞僌偵愙抧偡傞傛偆廮傜偐傔偺僙僢僥傿儞僌偑岲傑偟偄丅 斅億儕僇傪巊偭偨埨壙側僒僗儁儞僔儑儞婡峔丅 巊梡帪娫偑挿偔側傞偲曄宍偟偰偟傑偄僒僗儁儞僔儑儞偺婡擻傪壥偨偝側偔側偭偰偟傑偆寚揰偑偁傞 |
|
|
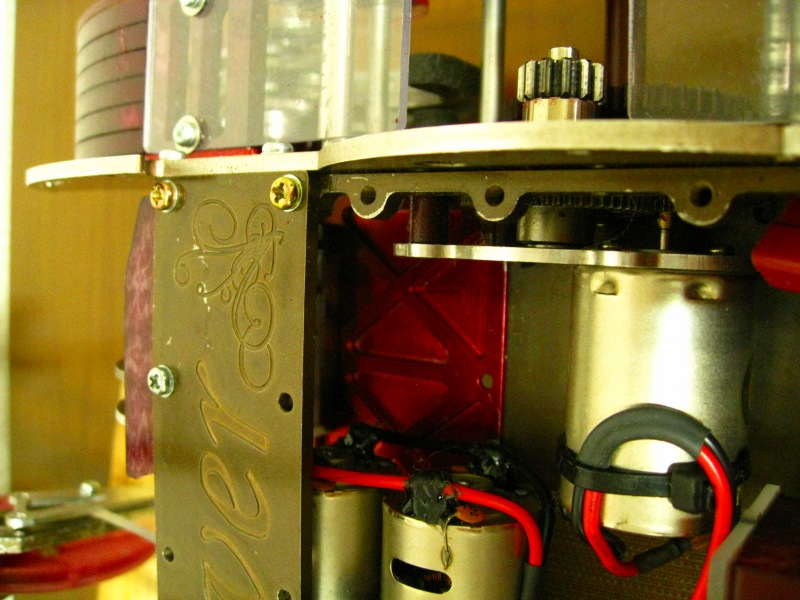
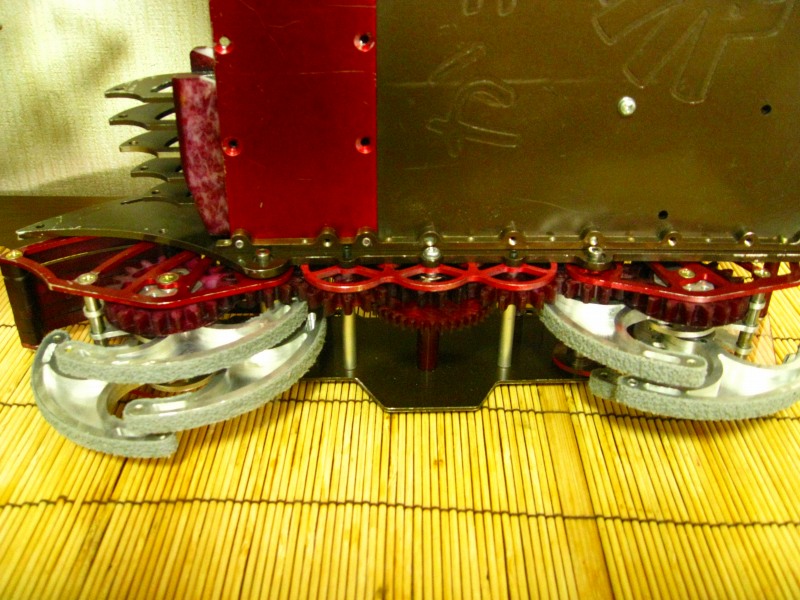
亜TADANO僿僢働儞婡峔
壗擭傕巊梡偟偨幚愌偺偁傞TADANO僿僢働儞媟傪嵦梡丅 忋壓偺怳摦偑彮側偔愗傝曉偟偑妸傜偐側偺偱惷偐偵曕偗傞丅 媟偺嵽幙偵偼3t偺僕儏儔儖儈儞傪慻傒崌傢偣偰巊梡偟偰偄傞丅 僐僗僩僷僼僅乕儅儞僗偑椙偔側偄丅 傑偨嫮偄椡偑壛傢傞偲曄宍偟偰媟偑棈傑傝惓忢摦嶌偱偒側偔側偭偰偟傑偆寚揰偑偁傞 懌偺棤偵偼 乽俁俵偡傋傝巭傔僥乕僾乿 傪嵦梡丅 忎晇側嵽幙偵嫮椡側擲拝嵻偑巊傢傟偰偄傞偺偱昁梫側僒僀僘偵僇僢僩偟偰偦偺傑傑揬傝晅偗傜傟傞丅 僑儉僀儃偑愨柇側僌儕僢僾椡傪敪婗偡傞偑丄懴杸栒惈偑崅偄偺偱岎姺昿搙偼崅偔側偄丅 偁傞掱搙偡傝尭偭偰偒偰偐傜偑杮斣丅 |
|
| 仭僽儗乕僪偲偐 | ||||
|
4t僕儏儔儖儈儞惢偱慡挿300mm偺僽儗乕僪傪嵦梡丅夞揮捈宎偼300mm丅 廳検偵梋桾偑偁偭偨偺偱俀杮捛壛偟偰俉杮僽儗乕僪偵側偭偨丅 傑偩梋桾偑偁偭偨偺偱僆僾僔儑儞傪偮偗偰傒偨丅 傑偩梋桾偑偁傞丅壗偐愊傒朰傟偨傜偟偄丅 侾係丗侾偱摦偐偟偨偲偒偵僽儗乕僪偑嬋偑偭偰偟傑偭偨偺偱偦偺偆偪偵6t偺僕儏儔儖儈儞偵曄峏梊掕 |
|
|
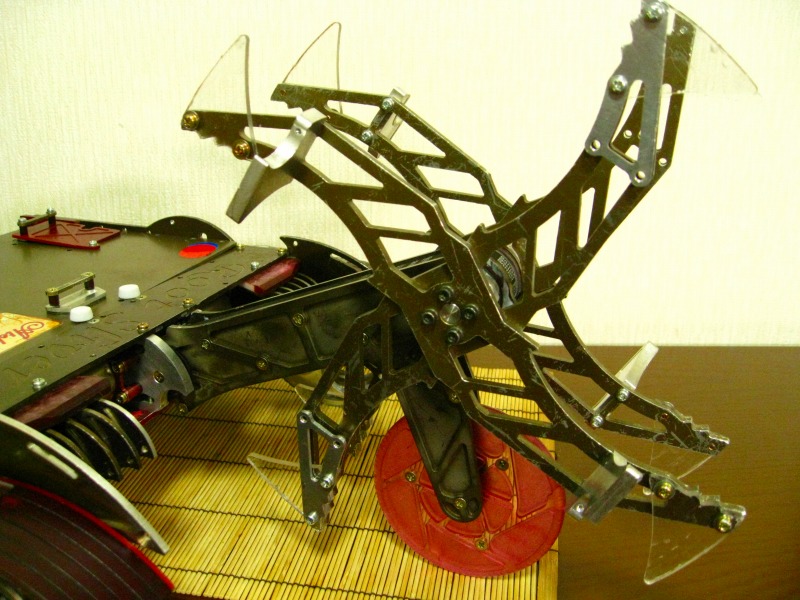
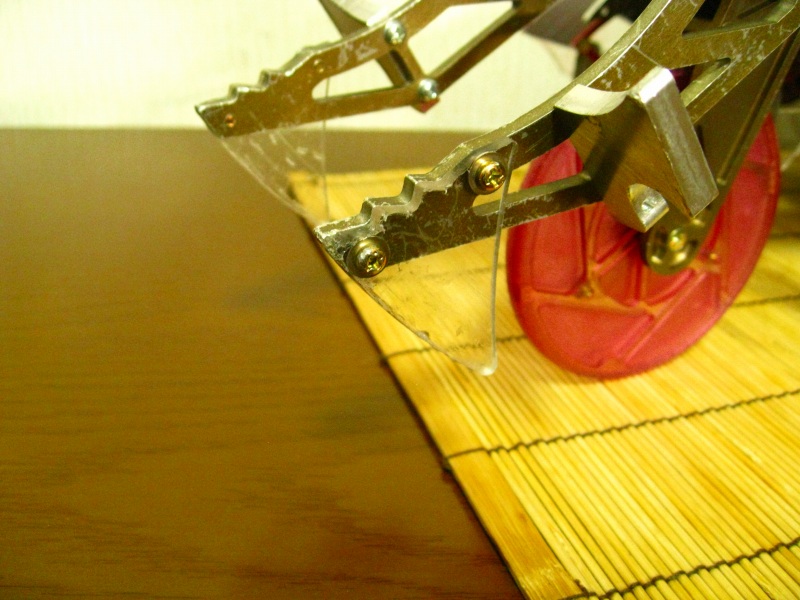
亜僽儗乕僪偺僆僾僔儑儞
僽儗乕僪偼偁偨傝敾掕偑嫹偄偺偱6t偺僕儏儔儖儈儞偱捾傪偮偗偰傒偨丅 僐儗偵傛傝墶偵傕偁偨傝敾掕偑敪惗偟偨偺偱揔摉偵夞偡偩偗偱傕岠壥偑偁傞丅 捾偼拞怱偵嬤偄埵抲偵庢傝晅偗偰偁傞偺偱愭抂偵斾傋僩儖僋偑偁傝丄嫮堷偵揋傪帩偪忋偘傞帠傕偱偒傞丅 傑偨夞揮拞偺捠夁揰偑崅偄埵抲偵偁傞偺偱媢椝偵傇偮偐傞偙偲偑側偄丅 僽儗乕僪偵偼揋偵巋偝偭偰棈傑傝傗偡偄抁強偑偁偭偨偺偱丄僽儗乕僪偺愭抂偵億儕僇偺僆僾僔儑儞傪偮偗偨丅 巋偝傝偵偔偔側偭偨偺偱弮悎偵乽堷偭偐偗偰搳偘旘偽偡乿摦嶌偑梕堈偵偱偒傞傛偆偵側偭偨丅 |
|
|
亜曗彆椫
億儕僇偐傜偺嶍傝偩偟 |
|
|
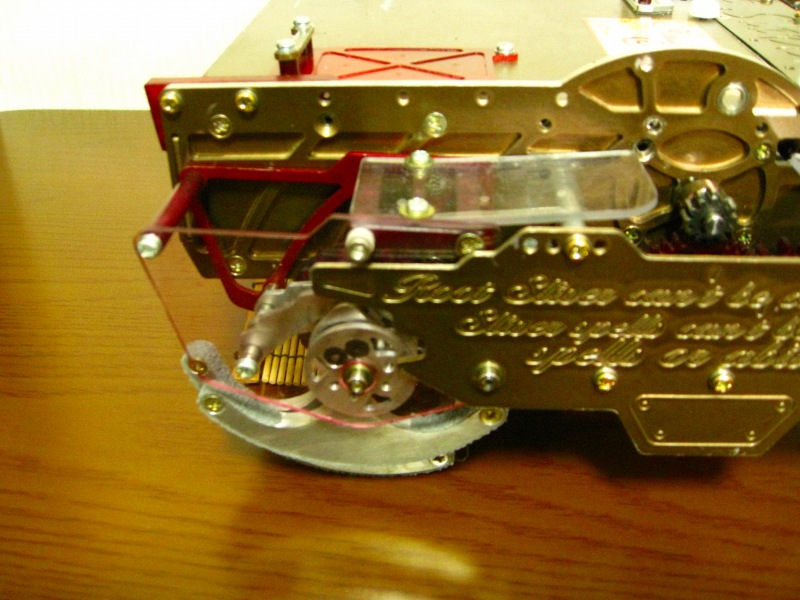
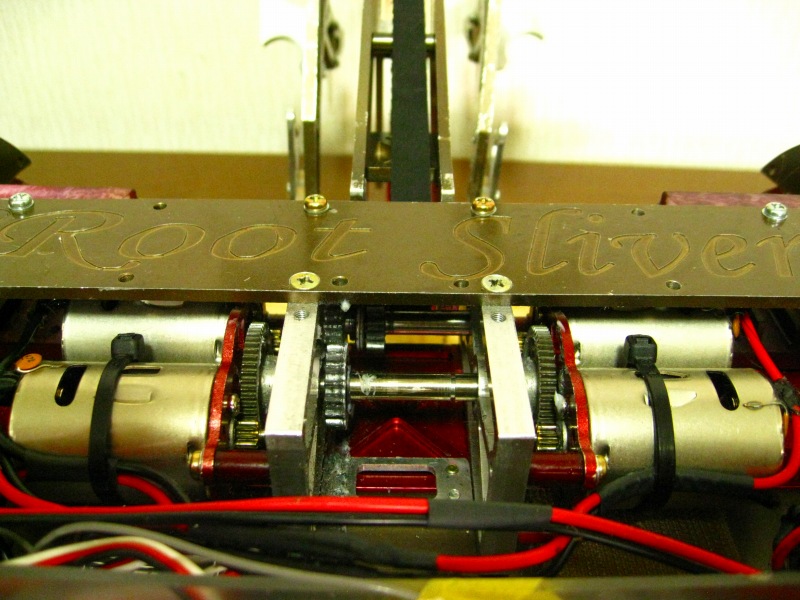
亜尭懍儐僯僢僩
僕儏儔儖儈儞惢帺嶌帟幵傪慻傒崌傢偣偨尭懍儐僯僢僩丅 徣僗儁乕僗偵廂傑偭偰偄傞丅 搑拞偺僊傾傪曄峏偡傞偙偲偱妱偲帺桼偵僊傾斾傪曄峏偱偒傞丅 偲傝偁偊偢俀俆丗侾偵側偭偰偄傞偑傕偆彮偟憗偔偰傕椙偝偦偆偩丅 僊傾斾偺曄峏傪峫偊側偗傟偽偝傜偵彫宆壔偡傞偙偲偑偱偒傞丅 |
|
| 仭偦偺傎偐 | ||||
|
亜僄傾僀儞僥乕僋
崅懍憱峴拞偵奜婥傪嫮惂媧擖偡傞偙偲偱儌乕僞乕傪椻媝偟 儌乕僞乕偺弌椡傪嵟戝23%UP偝偣傞偙偲偑偱偒偨傜偄偄側丅 |
|