|
亜媟婡峔
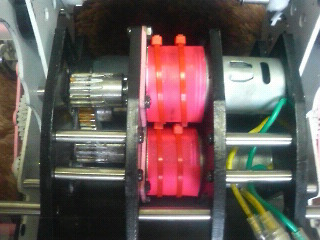
媟偺婡峔丗 TADANO僿僢働儞儕儞僋婡峔 摦椡丗 僞儈儎僊儎僪儌乕僞 (18.6丗1) 亊2 摦嶌揹埑丗 7.2V 尭懍斾丗 (偍傛偦)1.25:1 嵟廔尭懍斾丗 (偨傇傫)23.25:1 媟偺悢丗 俁杮侾僙僢僩亊6 傾儞僾丗 憃梩 MC330CR 儘儃僐儞巇條 乮僽儗乕僉僉儍儞僙儖乯亊2 亜傾乕儉婡峔 傾乕儉偺婡峔丗 忋偵嵹偣偰帩偪忋偘傾乕儉 摦椡丗 僞儈儎僊儎僪儌乕僞 (300:1) 亊2 摦嶌揹埑丗 7.2V 尭懍斾丗 2:1 傾儞僾丗 憃梩 MC330CR 儘儃僐儞巇條 乮僽儗乕僉僉儍儞僙儖乯亊1 |
|