比較的簡単に描け、効率の良いヘッケン脚(TADANOヘッケン脚)の描き方についての説明です。
ヘッケン軸から脚の先までの距離を変更することで脚のサイズを変更できますが他のパラメータは変化しません
>形状
図:1のような脚を描こうと妄想します。
図:1
この段階では細かい数値やはっきりした形状は決めません。
頭の中で考えているレベルです。
>ヘッケン軸の直径について
図:2のようにM3のネジ2本で固定するようにします。
図:2
ネジ2本で固定する理由はネジ1本での固定ではクランクの角度が変わってしまい動作不良の原因になるからです。
ネジ2本を使えるクランク軸の直径はφ10でした。
クランク軸の直径は10mmに決定します。
>ヘッケン節までの距離について
図:3は脚が一番下の状態を表しています。
図:3
この時ヘッケン節(仮)がクランク軸にぶつからないようにします。
ヘッケン節と脚の接合には3mmのノックピンを使います。
ヘッケン節とクランク軸は0.5mmの隙間ができるようにします。
ノックピンの中心からクランク軸の中心までの距離は
1.5mm(ノックピンの半径)+5mm(クランク軸の半径)+0.5mm(ヘッケン節とクランク軸の隙間)=7mm
ヘッケン節がノックピンを保持するためにヘッケン節に1mmの肉が必要なので、
7mm+1mm=8mm
がクランク軸の中心~ヘッケン節を接合するノックピンまでの距離となります。
>クランクの回転半径について
クランク軸の固定は2tのジュラルミンを使った薄型板クランクを使います。
図:4
クランク軸の回転半径を決めるわけですが
クランク軸の中心~ヘッケン節を接合するノックピンまでの距離:A
クランクの描く円の半径:B
A=<B
となっていると動作しませんので必ず
A>B
にしてください。
ただしA=Bに近づくほど少しの位相の変化で誤動作(脚の反転等)が発生しやすくなります。
今回は余裕を持って
A-1=B=クランクの描く円の半径=7mm
で設計します。
>クランクを動作するギアの選定
クランクを動作させるギアはできるだけ小さくなるように設計します。
ギアを小さくすることで図:4ヘッケン節Bの位置がギアの中心に近づき脚をコンパクトにすることができるからです。
図:4
今回はモジュール2で歯数20のギアを使うことにします。
ギアの選定は最終的な減速比を考慮して行います。
減速比が小さいと脚は速く動作しますがほとんど空転に近い状態になり最高速になるまで時間がかかります。
またトルクが小さいので押し合いをした時に脚がロックしてしまうこともあります。
減速比が大きすぎるとトルクはありますが機体の動作速度が遅くなり試合では不利になります。
また大きすぎるトルクは脚がロックしても自壊しながら動作しようとするのでお勧めできません。
自壊せず、ほどよいトルクで、ホイルスピン(?)しない脚が理想です。
個人的には40~50:1くらいがちょうどいいと思っています。
(脚の半径によって最終的な速度は変わってきます。)
今回図:4のギアに20tを選択した理由ですが
60:9
45:12
20:12
でモーター~最終ギアまで減速した結果だいたい理想とするギア比になったからです。
>ヘッケン節Bの位置を決定する
ヘッケン節Bはギアにぶつから無い程度にギアにできるだけ近い位置に設定します。
A~Bまであまり距離があると脚先にぶつかってしまうのと、強度不足で途中で曲がってしまうからです。
図:5
AとBは平行な位置に設定します。
これだと脚の左右がだいたい同じ軌跡になるので設計が楽になるからです。
深く考えないでください。
>脚先の形状を決定する
今回設計するヘッケン脚は120°位相の3本脚ですがより滑らかな動作のために126°までの脚先を設計します。
図:6
とりあえず脚先の軌跡の半分、0°~63°までの状態を描きました
緑の直線:クランク軸の中心~ヘッケン節を接合するノックピンまでの距離
青の直線:クランク軸の中心~脚先までの距離
オレンジの直線:ヘッケン節A~Bまでの距離
赤の円:クランクの回転する軌跡
これらを合成したのが図:7です。
図:7
この図:7を使って脚先の軌跡を描きます。
図:8のように脚先の3点を円弧で繋ぎます。これが脚先の軌跡(仮)になります。
図:8
次に63°の状態を使って残り半分の軌跡を描きます。
はじめに63°の状態と脚先の軌跡をだけにします。
直線を垂直になるように回転します。
直線で線対称になるよう脚先の軌跡の半分を書き込みます。
図:9で脚先の軌跡126°分(仮)の完成です。
図:9
最後に図:9で描いた脚の軌跡を完全な円弧に書き換えます。
今のままでは歪な円弧なので脚の形状を描くのに不都合だからです。
図:10
図:10紫の丸を繋いだ円弧(紫)が最終的な脚先の軌跡になります。
多少理想の軌跡とは違っていますが不具合は発生しません。
最終的な脚先の軌跡は滑り止めのゴムなどが計算に入っているので、脚の形状を決定するためにはゴムの分小さくする必要があります。
そのことを考慮して設計した脚の形状が図:11です。
図:11
>ヘッケン節の設計
ヘッケン節の形状を設計します。
ヘッケン節は脚の反転を防止するためのストッパーでもあるので、
図:12のように脚が最大に伸びた時と最大に縮んだ時に脚の反転を防ぐような形状である必要があります。
図:12
図:12の状態で反転しないようにヘッケン節の形状を決定します。
図:12右の状態でヘッケン節にクランク軸が接するようにすると脚は反転しません。
クランクが反時計回りに回転するとヘッケン節を上に押し上げる働きをします。
図:12左の状態ではヘッケン節がこれ以上下がらないように脚にストッパーを追加したのが図:13です。


図:13
このストッパーがヘッケン節の動きを制限するので脚が反転する心配は無くなります。
最終的な脚とヘッケン節の形状は図:14になりました。
図:14
>組み立て
部品を加工して組み立てます。



図:15
これを12セット作って完成です。
クランク軸の通る穴はφ10.02mmくらいのハンドリーマーで整えてください。
動作部にはグリスを塗ってください。
アルミ同士が接しているのでグリスを塗らないとすぐに焼き付いてしまいます。
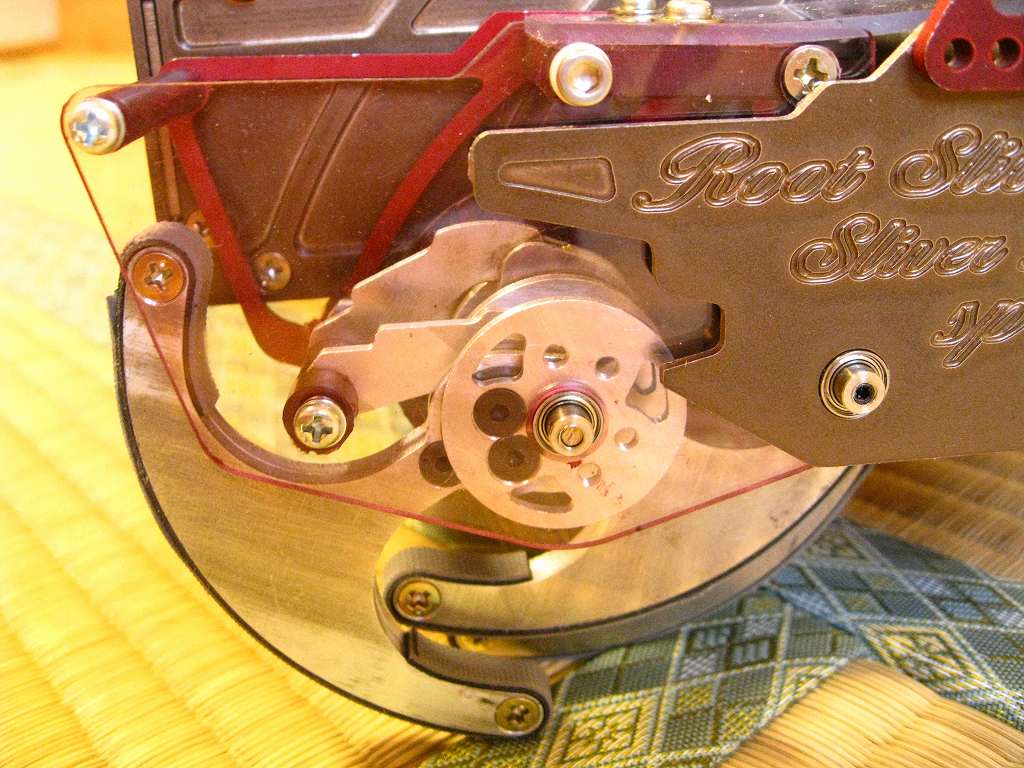
図:16
くみ上げた脚はこんな感じになります。
ってゆーかこうなるようにくみ上げてください。
>DXFファイルとか

図:ヘッケン節、クランク、ギアの追加パーツ
DXFファイル
crvファイル

図:ギア
DXFファイル
crvファイル
図:脚1
DXFファイル
crvファイル
図:脚2
DXFファイル
crvファイル
図:クランク軸(実際はジュラルミン棒を旋盤加工する)
DXFファイル
crvファイル
図:全部品
DXFファイル